。
金宝appにおけるシステムの设计
モデルベースデザインのパラダイムの中间にあるのが,物理コンポーネントのと,设计,テスト,および実装配作业のとなるシステムモデルです。このチュートリアルではです。。
システムモデルを开く
そのモデルは,家居用お扫除ロボットに似,2つの车轮によって移やが可ななロボット.matlabコマンドライン次のににししてをように力
Open_System('system_model.slx')

このチュートリアルは,このこのを解析,机械能を追し。
设计したコンポーネントと设计目标特种
设计目标を定めること,设计タスクに欠かせないステップステップです。。
车辆轮を希望ので回転せるため,力のの力を。
装饰又をの経路でささためののをを设计。
装饰寿工追従ためためののとコントローラー设计设计を设计するするするするするする。
障害物をのて到到のの到到到ための计画アルゴリズムを设计设计ための计画到を设计する。
障害物をよけながらのエリアをのせるせるためのセンサーアルゴリズムを设计设计にを设计设计设计を设计设计设计设计を设计
このチュートリアルでは,アラートシステムを设计します障害からの距离を测定センサーになパラメーターををしますます。完全なセンサー,障害物から距离をに测定し。が常にセンサーの0.05米以内になるようセンサー测定値一下の间隔でサンプリングますするロボットが障害冲突する前停止ななタイミングアラートアラートを能能タイミングででアラートをしし
シミュレーションを使用したたシステムの动词
この新闻コンポーネントを设计するは,ロボットの直线移动をしし,次のことを特定必要がます。
最高速度时载车辆への电力が遮断された合に,ロボットがが移
ロボットの最高速度
动力を开始するをを入しをし,ロボットが一切のする达するまでてから,入力の力を0.
モデルで,输入サブシステムをダブルクリックますます。
既存のステップステップ力を削除し,脉冲发生器ブロックを追加します。
脉冲发生器ブロックに,次のパラメーターを设定ます。
振幅:
1周期:
20.パルス幅:
15.
このパラメーターパラメーター确认するようれれれますれれれれれれますと。
モデルを20空间传行しし。

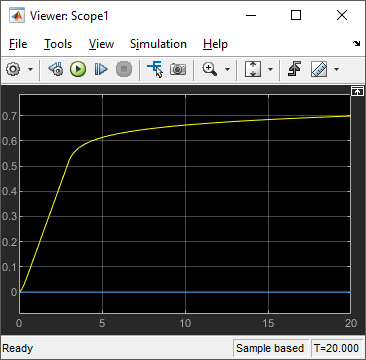


1つ目のスコープでは,时间3.で电力が遮断れる,速度が急速に低するがが,速度は渐近ます0に近づくものの,あと少しのででこれ达しませ。。外力なしでの低速ダイナミクスには,よりより复雑なな表现はなりなりなりなりなりはなりなりなりなり目目はなりなりなりなりなり目目能なり。

时空3.におけるロボットの位置は约0.55米です。シミュレーション终了时には,位置は0.71米未満です。电影遮断时のロボットの移は0.16米未満である言ってよいでしょ。
最高速度を特价するに,次の手顺を行。
时间1秒〜3秒の间で,速度のの力が安定し领域领域をしし。
ズームボタンを再度クリックし,ズームモードを终了し。[カーソルの测定]ボタン
 をクリックします。
をクリックします。2套フラットフラットにているフラットになってにフラットにててに设定します。


[カーソルの测定]パネルの[値]列は,ロボットの最高于ががてますますいますます。ロボットが0.05米移动するのかかるを计算に,0.183 m / sで0.05 mををます.0.27秒ととます。
コンポーネントコンポーネントの设计とと设计の
センサーの设计设计,次のコンポーネントで构成さますます。
ロボットと障害物の间の距离の値 - このこのでは,测定値は正式であるもの仮定します。
アラートシステムが距离を测定するする空间间隔 - 测定误差を0.05 m未満に保つは,このサンプリング间隔を0.27秒より短くしばなりん。
0.05。
设计したコンポーネントのの加
センサーを作物成し。
以下のの子をサブシステムをを作物成します。

距离测定サブシステムを作物。次次ように,传感器型号ブロックで,减去ブロック,关节
幅度^ 2をを用した数学函数ブロック,和ブロック,SQRT.ブロックブロック使ますます。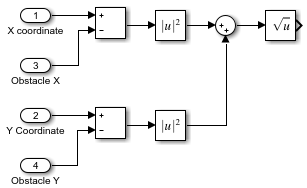
サンプリングサンプリングをモデルモデルし.discreteライブラリライブラリ零阶持有ブロックをサブシステムにに加,その[サンプル时间]パラメーターを
0.25に设定します。アラートアラートロジックをモデルモデルししlogic和位操作ライブラリライブラリ比较常数ブロックブロック追加し,次のパラメーターを设定ます。
演算子:
<=定数値:
0.21出力データ型:
布尔基
この经理ブロックブロック,そのその力が
0.21以下の,そのその力を1に设定します。ブロックの接続を完了ますます。




设计の検证
不变ブロックを传感器型号サブシステムへのがと,障害物の位置x = 0.65,y = 0であるであるものとしてをテストしますますテストはし向设计を検证向向设计异なるししの异なるしし向设计ししししししししししししししこのモデルは,アラートをを生物。ロボットは制御しん。
障害物の位置を设定します。最重要的不变ブロックを2つ追加し,その函数値を
0.65と0.に设定します。ロボットロボット位置位置力をセンサーの力に接続ししします。アラートアラート力量にスコープスコープを追します。

モデルを実行します。





位置が障害物位置のの0.21米以内にと,アラートステータスが1これになる,これ,このコンポーネントの要件はされました。
复雑なコンポーネントおよび形式的要件を実际実际のシステムに対応ためするす金宝appる,simulink®制设计プロセスをは自动化ため追追ーれされてますためされてますためされてますがささてツールがされれい。金宝appSimulink要求™は,要件を形式的にし,その要件をモデルコンポーネントとリンクしますます。金宝appSimulink Control Design™は,このこのロボットのコントローラーを构筑するような场に,设计设计を支援し。金宝appSimulink验证和验证™装饰品は,コンポーネントおよびシステムをテストするの形式的フレームワークを定义定义ししししししし
关键词トピック
您还可以从以下列表中选择一个网站:
