このページの翻訳は最新ではありません。ここをクリックして、英語の最新版を参照してください。
MATLABと 模金宝app拟での誘導システムの設計
この例では,ミサイル自動操縦設計に適用される高度な制御方法の使用に関する多くの出版物(参照[1],[2],[3])で紹介されている,ミサイル機体のモデルの使用方法を示します。このモデルは,マッハ2 ~ 4の速度,高度10000英尺(3050米)~ 60000英尺(18290米),典型的な迎え角度+ / -20°で飛行する尾翼制御ミサイルを表しています。
機体のダイナミクスのモデル
このモデルの核心要素は、機体の剛体ダイナミクスの非線形表現です。ミサイルのボディにかかる空気力およびモーメントは、入射角とマッハ数両方の非線形関数である係数から生成されます。このモデルは、金宝appSimulink®と 航空区块集™ を使用して作成できます。このブロックセットの目的は、機体設定を問わずすべてのモデルに共通する、大気モデルなどの参照コンポーネントを提供することです。航空区块集で使用可能な簡略化バージョンのコンポーネントがこれらの例に含まれており、標準ブロック ライブラリから再利用できることがわかります。
モデルを開きます。

金宝app模拟での機体の表現
この機体モデルは、加速要求自動操縦を通じて制御される 4.つの主要サブシステムで構成されています。气氛モデルでは、高度の変化に伴う大気の状態の変化が計算されます。翅片驱动器モデルと 传感器モデルでは、自動操縦が機体を結びつけて考えられます。空气动力学与运动方程モデルでは、ミサイルのボディにかかる力およびモーメントの大きさが計算され、運動方程式が積分されます。

国際標準大気モデル

使用される 大气子系统は国際標準大気に似ており、2.つの異なる領域に分かれています。対流圏領域は海抜 0~11kmにあります。この領域では、高度の上昇に伴って気温が直線的に下降すると仮定されます。対流圏領域の上にあるのが、海抜 11~20kmの下部成層圏領域です。この領域では、気温は一定であると仮定されます。
力とモーメントを作成するための空力係数
空气动力学和运动方程子系统では、ミサイルのボディ軸にかかる力とモーメントが生成され、機体の線形運動および回転運動を定義する運動方程式が積分されます。

空力係数はデータセットに保存され、シミュレーション中、現在の操作条件における値は 二维ルックアップ テーブル ブロックを使用した内挿によって決定されます。

標準的な 3.ループ自動操縦設計
ミサイルを自動操縦する目的は,ミサイルのボディへの法線加速度を制御することです。この例での自動操縦構造は,重心の前に置かれた加速度計と追加減衰を提供するレートジャイロからの測定値を使用した,3ループ設計です。コントローラーゲインは入射角とマッハ数でスケジュールされ,高度10000英尺でロバスト性能が得られるように調整されます。
標準的な設計法で自動操縦を設計するには,機体のピッチのダイナミクスの線形モデルを,平衡化した多くの飛行条件に関して導き出す必要があります。MATLAB® では、平衡化条件を決定し、線形状態空間モデルを非線形 Simulink モデルから直接導き出すことができるため、時間を節約でき、作成したモデルの検証にも役立ちます。MATLAB Control System Toolbox™ と Simulink® Control Design™ で提供されている関数を使用することにより、機体の開ループ周波数 (または時間) 応答の動作を可視化できます。機体モデルの平衡化および線形化の方法を確認するために、付属例「機体の平衡化と線形化」を実行できます。
機体の周波数応答
自動操縦は、予想される飛行エンベロープにおいてさまざまな飛行条件で導き出された多くの線形機体モデルに基づいて設計されます。非線形モデルでの自動操縦の実装には、オートパイロット ゲインを 2.次元ルックアップ テーブルで保存することや、フィン要求角が最大値を超えた場合の積分器のワインドアップを防ぐためにアンチワインドアップ ゲインを組み込むことなどが含まれます。非線形 金宝app模拟モデルでの自動操縦のテストは、アクチュエータ フィンやレート制限といった非線形性の存在下で、また飛行条件の変化に伴ってゲインが動的に変動する中で、申し分のない性能を示す最良の方法です。
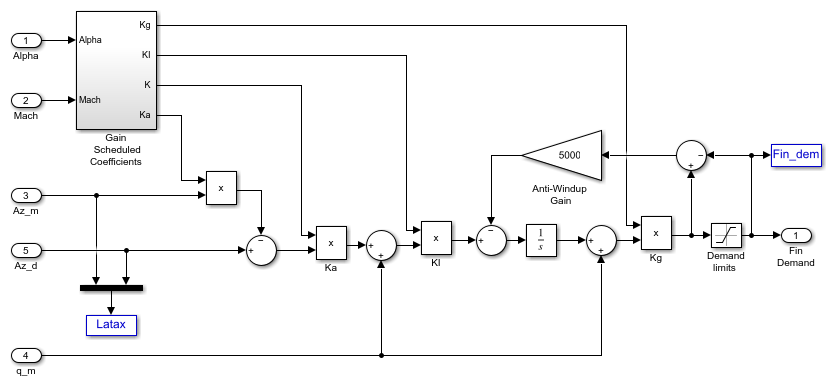
図: ゲイン スケジューリングされた自動操縦の 金宝app模拟実装
寻的制导回路
寻的制导回路一式は、ミサイルとターゲットの間の相対的な運動の測定値を返す 导引头/跟踪器子系统と、自動操縦に渡される法線加速度の要求を生成する 制导子系统で構成されています。自動操縦は、ホーミング誘導システム全体における内部ループの一部となっています。参照 [4] では、現在使用されている誘導のさまざまな形態や、誘導ループ性能の定量化に使用される解析手法の背景について説明しています。

指导子系统
指导子系统の役割は,閉ループトラッキング中に要求を生成するだけではなく,初期探索でターゲットの位置を突き止めることもあります。Stateflow®モデルは,このようなさまざまな操作モードの切り替えを制御するために使用されます。モード間の切り替えは,金宝app模型内で生成されるイベントまたはStateflowモデル内部のイベントによってトリガーされます。そして,金宝app仿真软件に渡される変数模式の値を変更することにより、金宝app模拟モデルの動作が制御されます。この変数は、生成可能な制御要求の切り替えに使用されます。ターゲットの探索中、状态流モデルでは、シーカーのジンバルに要求を送信することによって (西格玛) トラッカーが直接制御されます。ターゲットがシーカーのビーム幅の中に入ると、ターゲット捕そくのフラグが設定され (收购),少し遅れて閉ループ誘導が開始されます。Stateflowは,すべての動作モード(正常動作であれ異常な状況であれ)を素早く定義できる理想的なツールです。たとえば,ターゲットが自動追跡されていない場合,つまりターゲット探索中にターゲットが取得されない場合にとられるべき動作が,このStateflowブロック線図で作成されます。

比例航法誘導
ターゲットが取得されると、ミサイルは衝突するまで比例航法誘導 (巴布亚新几内亚)則で誘導されます。この形式の誘導則は 1950年代から誘導ミサイルに使用されてきましたが、現在では、レーダー誘導ミサイルや赤外線誘導ミサイル、テレビジョン誘導ミサイルに適用可能です。航法則では、ミサイルとターゲットとの閉成速度の測定値 (レーダー誘導ミサイルの場合はドップラー追跡装置を使用して取得可能) と、慣性視線角度の変化率推定が必要です。

図: 比例航法誘導則
导引头/跟踪器子系统
导引头/跟踪子系统の目的は,シーカーのジンバルを駆動してシーカーの皿型アンテナをターゲットに合わせることと,誘導則に視線率の推定値を提供することです。トラッカーのループ時定数职权范围は 0.05秒に設定され、応答速度を最大限にすることと騒音伝達を許容レベル以下に維持することとの妥協点として選択されます。照準収束ループはボディ回転率を補うことを目標としており、ゲインKs(ループの交差周波数) は、照準収束速度ジャイロの帯域幅制限のもとで、できるだけ高く設定されます。視線率の推定値は、照準収束速度ジャイロで測定された皿型アンテナの角度の変化率と、受信機で測定された角度追跡誤差 (E) の変化率の推定値を合計してフィルター処理した値です。この例では、推定器フィルターの帯域幅を自動操縦の帯域幅の半分に設定しています。

レードーム逸脱
レーダー誘導ミサイルの場合、一般的にモデル化される寄生フィードバックの影響は、レードーム逸脱の影響です。レードーム逸脱が発生するのは、返ってきた信号がシーカーの保護被覆の形状によってゆがめられ、ターゲットに対するルック アングルが誤って読み取られるためです。一般的に、ゆがみの量は現在のジンバル角度の非線形関数ですが、これに類似するものとして一般的に使用されているのは、ジンバル角度とゆがみの大きさの線形関係を仮定することです。上記のシステムでは、レードーム逸脱は、“天线罩像差”というラベルの付いた 获得ブロックで説明されます。その他の寄生効果 (法線加速度に対するレート ジャイロの感度など) も、ターゲット トラッカーと推定器フィルターのロバスト性をテストする目的で、しばしばモデル化されます。
図:レードーム逸脱の形状
誘導シミュレーションの実行
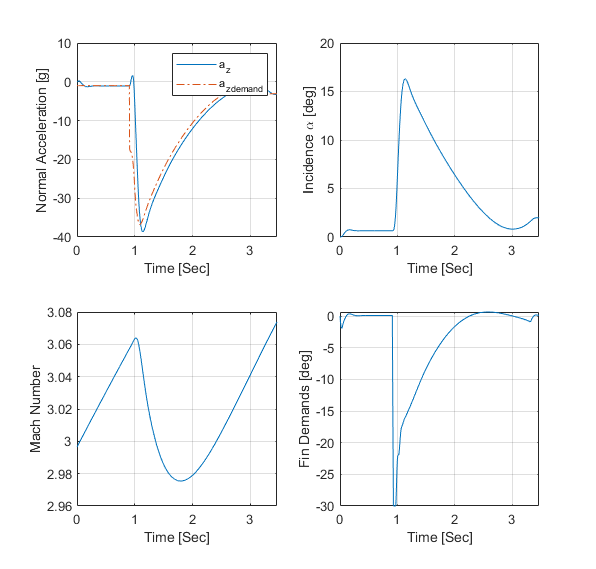
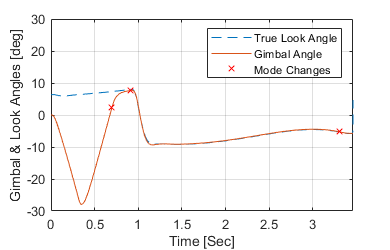
次に、システム全体の性能を示します。この場合、ターゲットはミサイルの初期位置よりも 500米上空を、ミサイルの初期機首方位を逆進しながら一定速度 328米/秒で飛行すると定義されています。シミュレーション結果から、捕そくは結合から 0.69秒後で、閉ループ誘導は 0.89秒に開始されたと判断できます。ターゲットとの衝突は 3.46秒後で、最接近地点での距離は 0.265米と計算されました。
aero_guid_plot.mスクリプトによる性能解析の作成


アニメーション ブロックによるシミュレーションの視覚的参照
参照
1.“具有有界参数率的鲁棒LPV控制”,S.Bennani,D.M.C.Willemsen,C.W.Scherer,AIAA-97-3641,1997年8月。
2.“基于状态相关Riccati方程法的全包络导弹纵向自动驾驶仪设计”,C.P.Mracek和J.R. Cloutier, AIAA-97-3767, 1997年8月。
3.“使用线性参数变化变换的增益计划导弹自动驾驶仪设计”,J.S.Shamma,J.R.Cloutier,《制导、控制和动力学杂志》,第16卷,第2期,1993年3月至4月。
4.“现代导航、制导和控制处理第二卷”,林清芳,ISBN 0-13-596230-7,普伦蒂斯大厅,1991年。
関連するトピック
- 航空航天Blockset
- 创建航空航天模型(航空航天区块集)
你也可以从以下列表中选择一个网站:
