主要内容
车辆动力学可视化-多对象仿真
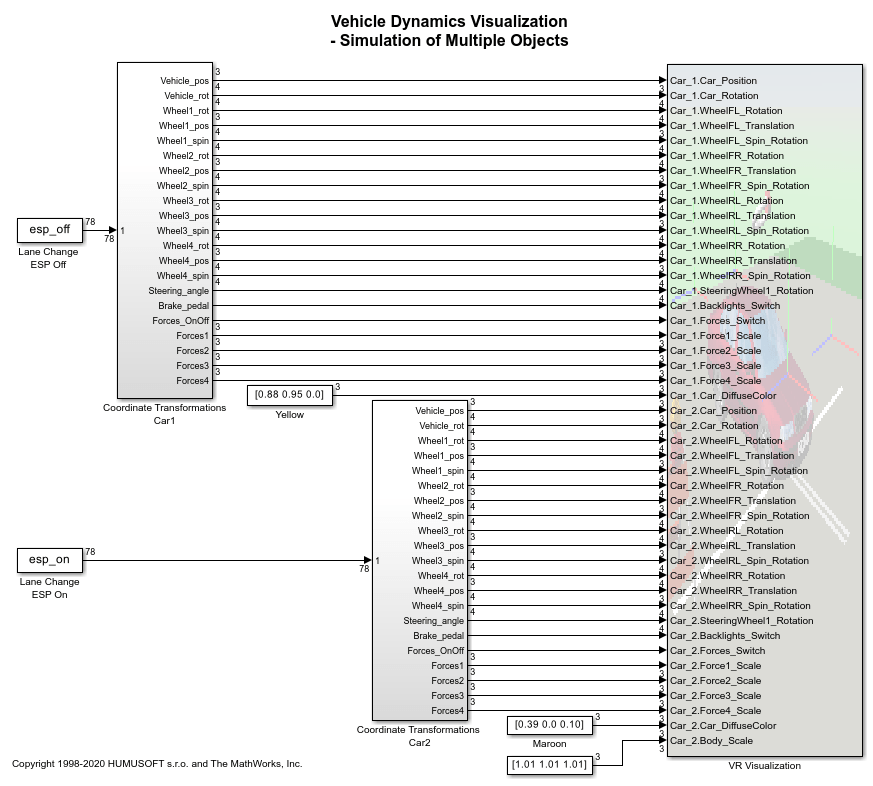
这个示例扩展了vr_octavia示例,以显示多对象场景可视化。
预先计算的模拟数据代表了在两种车辆配置下进行的标准“双车道变换”操作——电子稳定程序控制单元启动并关闭。两组车辆动态数据被平行发送到虚拟现实场景中,在虚拟现实场景中,他们驾驶两辆不同的车辆。
车辆使用VRML97 EXTERNPROTO机制建模。这意味着在与VR Sink块相关的主要虚拟世界中,可以创建几个相同的车辆作为一个普通3D对象的实例。这种方法极大地简化了虚拟世界的创作。例如,创建第三辆车来同时可视化另一个模拟场景是非常容易的。
除了在vr_octavia例子中控制的车辆属性外,车辆原型还允许用户定义车辆的颜色和比例。这些属性用于区分单独的汽车实例(颜色),并避免两个几乎对齐的3D对象(比例)不愉快的视觉交互。通过缩放其中一辆车,一辆车被包围到另一辆车中,这样他们的脸就不会根据当前的模拟数据在每个模拟步骤中随机剪切。
如果你不喜欢用这种方式来观察车辆,而是“并排”地观察车辆,可以在车辆的位置上添加偏移量。
确认:
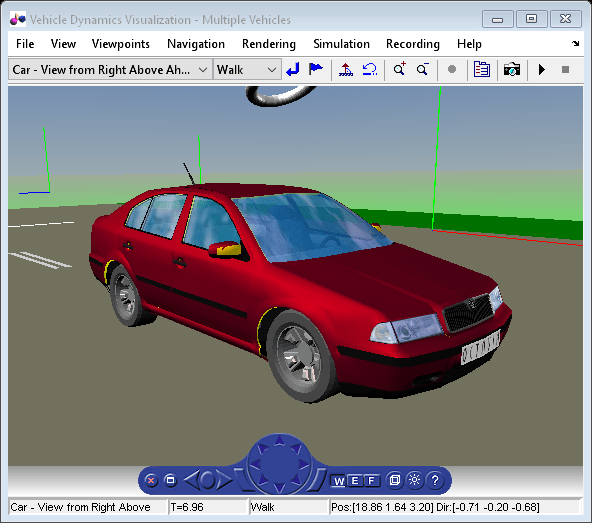
斯柯达明锐车型版权属于斯柯达汽车,由捷克Ismar VR提供。
你也可以从以下列表中选择一个网站: