HL-20の自動操縦における角速度の制御
これは,HL-20机芯用途の制御にするパートパートパートはパートパートパートはは。
制御アーキテクチャ
飛行制御システムをもつHL-20モデルを開きます。
open_system (“csthl20_control”的)

この6-DOFモデルモデルNASA HL-20升降机身机身(航空航天块集)モデルからはしものです。“指导系统”は,滑空角のおよび対応する,迎角(alpha),および横滑り角(Beta)の各コマンドを生成しし。“飞行控制系统”は,コントロールサーフェスがこれらのコマンドに追従ようよう调整をいいます追従するよう调整をいい。“飞行控制系统”内の“控制器”ブロックブロック,异なる自动操縦构成をもつバリアントサブシステムです。
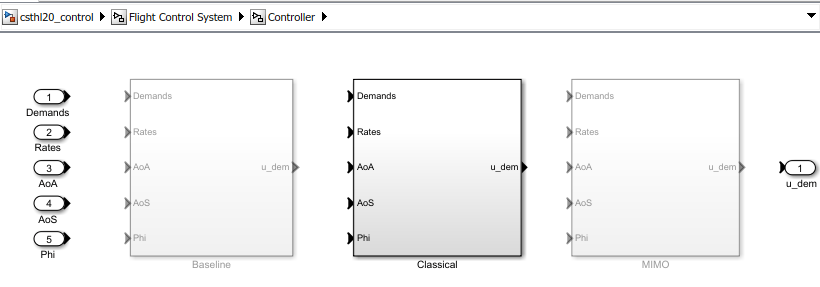
“基线”コントローラーと“古典”コントローラーコントローラー,内侧の3つのpのみので角速度p,q,rを制御,外交の3つのpiループ角度位置phi,alpha,betaをを制御するクラシックなループループを使使用し.6つの比例ゲインと3つのβのはalphaとbetaの关键“基线”バリアントは,NASA HL-20升降机身机身(航空航天块集)で取り上げられているベースライン设计设计が含まますれラインのパートパートますれ。。その値を2に设定すると,コントローラーコントローラー“古典”バリアントが有效にますますます。
%选择控制器的“古典”变体CTYPE = 2;%呼叫模型更新以确保在线化期间仅分析主动变量信号set_param (“csthl20_control”那'simulationcommand'那'更新');
このバリアントでは,自动操縦ゲインをスケジュールするにテーブルとmatlab功能

コントローラー调整の设定
このシリーズのパート1 (HL-20机体の平移化学と绕号化)では,40の异なる机体方向,つまり40の异なる(alpha,beta)値ペア“HL20机身”ブロックと“控制选择器”ブロックの线形モデル取得した。ます。
加载csthl20_TrimDataG7.CS大小(七国集团)
8x5状态空间模型数组。每个模型具有34个输出,9个输入和7个状态。
尺寸(CS)
8x5状态空间模型数组。每个模型有6个输出,5个输入和0个状态。
制御制御システムの设计设计と解析に适したたたたた形形形モデルモデルを取得にははするにははににSLTUNER.インターフェイスインターフェイス使使使とと利。
ST0 = slTuner (“csthl20_control”);st0.ts = 0;%要求连续时间线性化
ここでは着目するポイントに,角度と速度の要求,対応する応答,および偏向角哒,德,が博士含まれます。
AP = {'da; de; dr''HL20机身/ PQR'“Alpha_deg”'beta_deg''phi_deg''控制器/古典/需求'%角要求'p_demand''q_demand''r_demand'};ST0.addPoint(美联社)
“HL20机身”ブロックと“控制选择器”ブロックの线形化さたモデル既に(alpha,beta)の关键词として取得てあるので,“csthl20_control”モデル全体を形をを形ををは,各绕线成分をinnighモデルモデル群に置き换えるのの単単単単ななですこれはは置换置换れれ,通常の料,复雑なモデルを函数のの操形モデルモデルをするする最も的な方法です
%通过8×5线性化模型G7取代“HL20机身”块blocksub1 = struct('姓名'那'CSTHL20_CONTROL / HL20 AIRFRAME'那'价值',g7);%CS替换“控件选择器”blocksub2 = struct('姓名'那'CSTHL20_CONTROL /飞行控制系统/控制选择器'那'价值',CS);%将“执行器”替换为直接馈通(忽略饱和和二阶执行器动力学)blocksub3 = struct('姓名'那'CSTHL20_CONTROL /执行器'那'价值',眼睛(6));st0.blocksubstitutions = [blocksub1;blocksub2;blocksub3];
これで,制御の設計部分に進む準備が整いました。
内侧のループを闭じる
角速度p,q,rを制御する3つの内侧のループから开始します。方向付けのため,偏向角(da,de,dr)から角速度(p,q,r)への开着します。SLTUNER.インターフェイスでは,关关节の任意の达关键词
%注意:第二个'da; de; de; des'在植物输入上打开所有反馈循环gpqr = getiotransfer(st0,'da; de; dr'那'pqr'那'da; de; dr');波德(Gpqr (1, 1), Gpqr (2, 2), Gpqr(3、3),{1 e 1, 1 e3}),网格传奇(“da p”那'de to q'那'去r'的)

このボード線図には,5 rad / sを超えると対角項が積分器(符号まで)として動作することが示されています。したがって,比例のみの制御の使用が正当化されます。ベースライン設計と同じように,p, q, rループのターゲットの帯域幅をそれぞれ30日22.5,37.5 rad / sに設定します。(α,β)の各値に対するゲインKp, Kq,基米-雷克南は,これらの周波数でのプラント周波数応答から簡単に得ることができ,位相プロットには,Kpが正(負のフィードバック),KqとKrは負(正のフィードバック)になる必要があることが示されています。
计算每个条件的Kp,Kq,Kr。生成的数组%有大小[1 1 8 5]kp = 1./abs(evalfr(gpqr (1,1),30i)));kq = -1./abs(日见列难(GPQR(2,2))));kr = -1./abs(日见列公(gpqr(3,3));BODE(GPQR(1,1)* KP,GPQR(2,2)* KQ,GPQR(3,3)* KR,{1E-1,1E3}),网格传奇(“da p”那'de to q'那'去r'的)

内侧ののループのの设计を完了する,これらのゲイン値をs金宝appimulinkモデルモデルの対応するルックアップテーブルにプッシュしSLTUNER.オブジェクトを更新します。
mws = get_param(“csthl20_control”那'modelworkspace');mws.assignin(“金伯利进程”,挤压(kp))mws.assignin(“Kq”,挤压(kq))mws.assignin(“Kr”,挤压(kr))刷新(st0)
3(HL-20の自動操縦の姿勢制御——输出設計)ではクラシックなsisoアーキテクチャアーキテクチャを调整方法をを明し,4(HL-20の自动操縦姿势姿势 - mimo设计)ではMIMOアーキテクチャの利点についてびます。
关键词する
你也可以从以下列表中选择一个网站: