このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
自動PID調整およびグラフィカルなボード設計法を使用した補償器の設計
この例では,制御システムデザイナーアプリで自動PID調整を使用して仿真软金宝app件®モデルの補償器を設計する方法を説明します。次に,開ループボードエディターを使用して補償器の設計を微調整する方法を示します。
システムモデル
この例ではwatertank_comp_design金宝app仿真软件モデルを使用します。モデルを開くには,MATLAB®コマンドコマンドラインで次次ををししし
watertank_comp_design

このモデルでは,単一ループのフィードバックシステムに水箱系统プラントモデルとPIDコントローラーが含まれています。
貯水タンクのモデルを表示するには,水箱系统サブシステムを开启ます。

このモデルは次のような貯水タンクシステムを表しています。

ここで
Hはタンクの水の高さです。
Volはタンクの水の体系です
Vはポンプに印加された電圧です。
一个はタンクの水の断面積です。
bはタンクに流れる流量に関連した定数です。
一个はタンクから流れる流量に関連した定数です。
水が上部からタンクに流れ込む速度は,ポンプに印加された電圧に比例します。水がタンクの底にある開口部を通り抜ける速度は,タンク内の水位の平方根に比例します。水流レートにある平方根は,非線形プラントとなります。これらの水流レートに基づいて,タンク内の水量の変化率は次のようになります。
設計要件
閉ループステップ応答について次の設計要件が満たされるようにPIDコントローラーを調整します。
オーバーシュートが5%未満
立ち上がり時間が5秒未満
制御システムデザイナーを開く
制御システムデザイナーを開くには,金宝app仿真软件モデルウィンドウの[アプリ]ギャラリーで(制御システムデザイナー]をクリックします。

制御システムデザイナーが开き,[アーキテクチャの编集]ダイアログボックスが自动的に表示れされれれれれ
調整するブロックの指定
調整する補償器を指定するには,[アーキテクチャの編集]ダイアログボックスで[ブロックの追加)をクリックします。
[调整调整ブロックを]ダイアログボックスで,左侧のペインにある控制器サブシステムをクリックします。[調整]列でPID控制器のボックスをオンにします。

[好的]をクリックします。
[アーキテクチャアーキテクチャの]ダイアログボックスで,选択したコントローラーブロック,アプリアプリ[ブロック]タブにある調整ブロックのリストに追加されます。また,[信号タブでも,PID控制器ブロックの出力が,アプリによって解析ポイントの[位置]のリストに追加されます。

制御システムデザイナーが開くと,金宝app仿真软件モデルで以前に定義された解析ポイントがすべて[位置]リストに追加されます。watertank_comp_designにはそのような信号が2つあります。
想要的水位ブロックの出力——閉ループステップ応答の基準信号
水箱系统ブロックの出力——閉ループステップ応答の出力信号
金宝app仿真软件モデルを線形化して制御アーキテクチャを設定するには,[好的]をクリックします。
既定では,制御システムデザイナーはプラントモデルをモデルの初期条件で線形化します。
アプリによってPIDコントローラーが[データブラウザー]の[コントローラーと固定ブロック]セクションに追加され。また,アプリによってPID控制器ブロックの出力での開ループ伝達関数が計算され,その応答が[データブラウザー]に追加されます。

閉ループステップ応答のプロット
コントローラー設計を解析するには,システムの閉ループ伝達関数を作成して,そのステップ応答をプロットします。
[控制系统]タブで(新規プロット]をクリックし,(新規ステップ]を選択します。

[プロットする新規一步]ダイアログボックスで,[プロットする応答の選択]ドロップダウンリストから(新規の入出力伝達の応答)を選択します。
入力信号を追加するには,(入力信号の指定)エリアで(+)をクリックします。ドロップダウンリストで想要的水位ブロックのの力を选択します。

出力信号を追加するには,(出力信号の指定)エリアで(+)をクリックします。ドロップダウンリストで水箱系统ブロックのの力を选択します。

閉ループ伝達関数を作成してステップ応答をプロットするには,[プロット]をクリックします。

応答プロットに最大オーバーシュートを表示するには,プロット領域を右クリックし,[特性]、[ピーク応答)を選択します。
応答プロットに立ち上がり時間を表示するには,プロット領域を右クリックし,[特性]、(立ち上がり時間]を選択します。

特性インジケーターにマウスのカーソルを合わせると,その値が表示されます。現在の設計には次の特性があります。
最大オーバーシュートは47.9%。
立ち上がり時間は2.13秒。
この応答はオーバーシュートの設計要件である5%を満たしていません。
自動PID調整を使用した補償器の調整
自動PID調整を使用して補償器を調整するには,[调整法]をクリックして[PID調整)を選択します。
[PID調整]ダイアログボックスの[仕様]セクションで次のオプションを選択します。
調整法- - - - - -
ロバスト応答時間コントローラータイプ- - - - - -PI.

[補償器の更新)をクリックします。アプリにより新しい補償器の設定で閉ループ応答が更新され、ステップ応答プロットが更新されます。

システムの性能をチェックするには,応答特性マーカーにマウスのカーソルを合わせます。調整された補償器をもつシステムの応答には次の特性があります。
最大オーバーシュートは13.8%。
立ち上がり時間は51.2秒。
この応答は,許可される最大のオーバーシュートである5%を超えています。立ち上がり時間は要件の5秒より大幅に遅くなっています。
ボード線図のグラフィカルな調整を使用した補償器の調整
立ち上がり時間を短くするには,グラフィカルなボード線図調整を使用して,対話形式で補償器のゲインを増加させます。
開ループのボードエディターを開くには,[调整法]をクリックして[ボードエディター]を選択します。
[編集する応答の選択]ダイアログボックスでは,PID控制器ブロックの出力で既に開ループ応答が選択されています。この応答のボードエディターを開くには,[プロット]をクリックします。
[ボードエディター]と[ステップ応答)のプロットを並べて表示するには,[表示]タブで[左/右]をクリックします。

[ボードエディター]プロットで,振幅応答を上方にドラッグし补偿しゲインゲインをて,帯域帯域を,応答帯域を増やし,応答を高度。

ボード応答を上方にドラッグすると,アプリによって補償器とそれに関連する応答プロットが自動的に更新されます。また,プロットを解放すると,ステータスバーの右側に更新されたゲイン値が表示されます。
ステップ応答が要件を満たすになる补偿补偿のを増やします.1つの可な解,ゲインを1.7に設定します。

このゲイン値での閉ループ応答には次の特性があります。
最大オーバーシュートは4.74%。
立ち上がり時間は4.36秒。
补偿器材エディターを使使使たコントローラー微调整
補償器のパラメーターを直接調整するには,補償器エディターを使用します。[ボードエディター]でプロットエリアを右クリックし,[補償器の編集)を選択します。
[補償器の編集]ダイアログボックスの[パラメーター]タブで,PIDコントローラーのゲインを调整ます。补偿器パラメーターの编集の详细についてはは補償器エディターを使用した仿金宝app真软件ブロックの調整を参照してください。

調整した補償器は設計要件を満たしていますが,整定時間が30秒を超えています。整定時間を改善するには,コントローラーの[P]パラメーターと[我]パラメーターを手動で調整します。
たとえば,補償器のパラメーターを次のように設定します。
[P]=
4[我]=
0.1
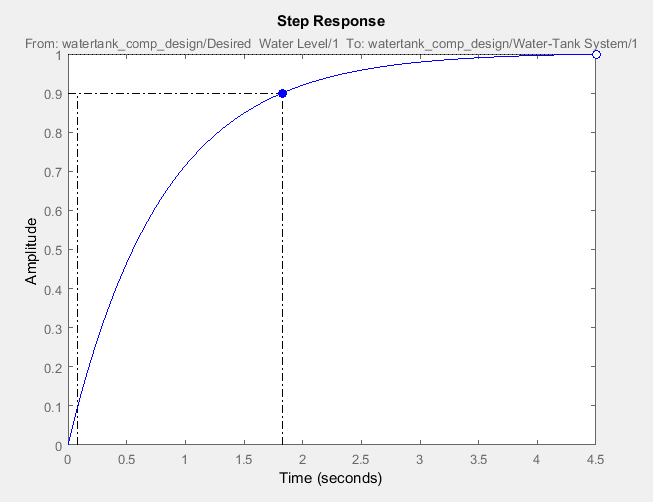
このこの器材から,次の特性をもつループ応答がられます。
大大オーバーシュートは0.206%。
立ち上がり時間は1.74秒。
整定时间は约3秒。
金宝appでの閉ループシステムのシミュレーション
調整されたコントローラーパラメーターをもつ非線形模型金宝appモデルをシミュレートして,補償器の設計を検証します。
調整した補償器パラメーターをPID控制器ブロックに書き込むには,制御システムデザイナーの[控制系统]タブで[ブロックの更新)をクリックします。
金宝appSimulinkモデルモデルウィンドウ,シミュレーションを実行し。
閉ループのシミュレーション出力を表示するには,范围ブロックをダブルクリックします。

非線形システムの閉ループ応答は,立ち上がり時間が5秒未満でオーバーシュートも最小となり,設計要件を満たしています。
参考
関連するトピック
你也可以从以下列表中选择一个网站: