竞争开关
读取VEXnet竞赛开关或现场控制器的开关位置
- 库:
金宝appVEX EDR V5金宝app机器人大脑的Simulink编码器支持包
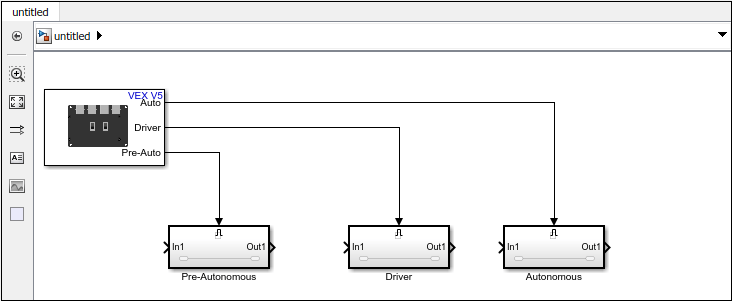
描述
Competition Switch块用于读取VEXnet Competition Switch的开关位置,并提供相应的逻辑值(1或0)作为输出。根据开关位置,此块可用于启用预自治、自治和驱动控制模式所需的逻辑。
港口
输出
参数
版本历史
在R2019a中引入
另请参阅
您也可以从以下列表中选择一个网站:
读取VEXnet竞赛开关或现场控制器的开关位置
金宝appVEX EDR V5金宝app机器人大脑的Simulink编码器支持包

Competition Switch块用于读取VEXnet Competition Switch的开关位置,并提供相应的逻辑值(1或0)作为输出。根据开关位置,此块可用于启用预自治、自治和驱动控制模式所需的逻辑。
在R2019a中引入
您也可以从以下列表中选择一个网站: