。GyD.F4y2Ba
二重振子運動のアニメーションと解GyD.F4y2Ba
,MATLAB®と符号数学工具箱™をを使しと重重示し示し示しますますますますますますます示します示し示します。GyD.F4y2Ba
二重振子の運動方程式を解き,アニメーションを作成して二重振子運動をモデル化します。GyD.F4y2Ba
手顺1:二重重子の质変位,速度,加入の定义GyD.F4y2Ba
次次の図は二重重ののモデルを示しものものものものものははははははと振り玉とととととととととととととと振り玉ととと振り玉振り玉ととととととととGyD.F4y2Ba

状态驰数を定义て二重重子の动きを记述します。GyD.F4y2Ba
1つ目の玉の角度位置GyD.F4y2Ba
2つ目の玉の角度位置GyD.F4y2Ba
変重をを重重重重ますしししますますますます。GyD.F4y2Ba
1つ目目の棒棒の长GyD.F4y2Ba
2つ目の棒の长さGyD.F4y2Ba
1つ目の玉の销量GyD.F4y2Ba
2つ目の玉の質量GyD.F4y2Ba
重力定数GyD.F4y2Ba
简介にするために,2つの刚体棒の质しますますます。GyD.F4y2BaSyms.GyD.F4y2Baを使用して指定します。GyD.F4y2Ba
Syms.GyD.F4y2Batheta_1 (t)GyD.F4y2Batheta_2 (t)GyD.F4y2BaL_1.GyD.F4y2BaL_2.GyD.F4y2BaM_1.GyD.F4y2BaM_2.GyD.F4y2BaGGyD.F4y2Ba
直交座標における二重振子の変位を定義します。GyD.F4y2Ba
x_1 = l_1 * sin(theta_1);Y_1 = -L_1 * cos(theta_1);X_2 = X_1 + L_2 * SIN(THETA_2);y_2 = y_1 - l_2 * cos(theta_2);GyD.F4y2Ba
关节GyD.F4y2Ba差GyD.F4y2Baを使用して,変位を時間で微分することで速度を求めます。GyD.F4y2Ba
vx_1 = diff(x_1);vy_1 = diff(y_1);vx_2 = diff(x_2);VY_2 = DEFF(Y_2);GyD.F4y2Ba
速度を时间で分でするでで加入度を求め。GyD.F4y2Ba
ax_1 = diff(vx_1);ay_1 = diff(vy_1);Ax_2 = Diff(Vx_2);ay_2 = diff(vy_2);GyD.F4y2Ba
手顺2:驾驶方程式の定义GyD.F4y2Ba
ニュートンの法则にづい动机方程式定义します。GyD.F4y2Ba
最初に,1つ目の棒张力をGyD.F4y2Ba としてとして指定,2つ目の棒张力をGyD.F4y2Ba として指定します。GyD.F4y2Ba
Syms.GyD.F4y2BaT_1.GyD.F4y2BaT_2.GyD.F4y2Ba
SuppancyGyD.F4y2Ba

に作用する力を評価します。水平方向と垂直方向の力の成分を均衡化して1つ目の玉の運動方程式を定義します。それらの2つの方程式をシンボリック方程式GyD.F4y2Baeqx_1.GyD.F4y2BaおよびGyD.F4y2Baeqy_1GyD.F4y2Baとして指定します。GyD.F4y2Ba
eqx_1 = m_1 * ax_1(t)== -t_1 * sin(theta_1(t))+ t_2 * sin(theta_2(t))GyD.F4y2Ba
eqx_1 =GyD.F4y2Ba
eqy_1 = m_1 * ay_1(t)== t_1 * cos(theta_1(t)) - t_2 * cos(theta_2(t)) - m_1 * gGyD.F4y2Ba
eqy_1 =GyD.F4y2Ba

水平方向评価します水の玉ををてをしますますますそれら定义のし程ますそれらそれらのし程程程し定义ししししししししししししししししGyD.F4y2Baeqx_2.GyD.F4y2BaおよびGyD.F4y2Baeqy_2GyD.F4y2Baとして指定します。GyD.F4y2Ba
eqx_2 = m_2 * ax_2(t)== -t_2 * sin(theta_2(t))GyD.F4y2Ba
eqx_2 =GyD.F4y2Ba
eqy_2 = m_2 * ay_2 (t) = = T_2 * cos (theta_2 (t) - m_2 * gGyD.F4y2Ba
eqy_2 =GyD.F4y2Ba
手顺3:力の评価とシステム方程式の简GyD.F4y2Ba
GyD.F4y2Ba
动动方程式には,GyD.F4y2Ba
那GyD.F4y2Ba
那GyD.F4y2Ba
,およびGyD.F4y2Ba
の4つの未未があります。GyD.F4y2Ba
とGyD.F4y2Ba
の2つの未知数をGyD.F4y2Baeqx_1.GyD.F4y2BaとGyD.F4y2Baeqy_1GyD.F4y2Ba关からします。关节GyD.F4y2Ba解决GyD.F4y2Baを使用してGyD.F4y2Ba
とGyD.F4y2Ba
ををます。GyD.F4y2Ba
张力=求解([eqx_1 eqy_1],[t_1 t_2]);GyD.F4y2Ba
とGyD.F4y2Ba
の解をGyD.F4y2Baeqx_2.GyD.F4y2BaとGyD.F4y2Baeqy_2GyD.F4y2Baに代入します。GyD.F4y2Ba
eqred_1 = summ(eqx_2,[t_1 t_2],[tension.t_1 tension.t_2]);eqred_2 = summ(eqy_2,[t_1 t_2],[tension.t_1张力.t_2]);GyD.F4y2Ba
简介した2つの方向程式で子运动が完全に记述されれ。GyD.F4y2Ba
手順4:システム方程式の求解GyD.F4y2Ba
システム方工程式を解いてて子运动を记述しますます。GyD.F4y2Ba
最初に,質量(GyD.F4y2Ba ),棒の長さ(GyD.F4y2Ba ),およびおよび力(GyD.F4y2Ba )をSI単位で定義します。それらの値を2つの簡約した方程式に代入します。GyD.F4y2Ba
l_1 = 1;l_2 = 1.5;m_1 = 2;m_2 = 1;g = 9.8;eqn_1 = subs(eqred_1)GyD.F4y2Ba
eqn_1 =GyD.F4y2Ba
eqn_2 = subs(eqred_2)GyD.F4y2Ba
eqn_2 =GyD.F4y2Ba
2つの方程式は非線形2階微分方程式です。これらの方程式を解くには,関数GyD.F4y2Baodetovectorfield.GyD.F4y2Baを使用して1階微分方程式に変換します。GyD.F4y2Ba
[v,s] = odetovectorfield(eqn_1,eqn_2);GyD.F4y2Ba
ベクトルGyD.F4y2BaV.GyD.F4y2Baの要素は,GyD.F4y2BaS.GyD.F4y2Baの要素の时空分别に等しい等しい等しい阶微程表し表し表し表し表しGyD.F4y2BaS.GyD.F4y2Baの要素は,状态函数GyD.F4y2Ba
那GyD.F4y2Ba
那GyD.F4y2Ba
,およびGyD.F4y2Ba
です。これらこれらの状态状态でで二重子の角と角速度速度をししとと速度速度をししGyD.F4y2Ba
S.GyD.F4y2Ba
S =GyD.F4y2Ba
次に1階微分方程式をハンドルGyD.F4y2BamGyD.F4y2BaをもつMATLAB関数に変換します。GyD.F4y2Ba
m = matlabfunction(v,GyD.F4y2Ba'vars'GyD.F4y2Ba, {GyD.F4y2Ba'T'GyD.F4y2Ba那GyD.F4y2Ba'是'GyD.F4y2Ba});GyD.F4y2Ba
状态状态数のの条件をGyD.F4y2Ba[PI / 4 0 PI / 6 0]GyD.F4y2Ba关とします。关节GyD.F4y2Ba数值GyD.F4y2Baをを用して状态状态のを求めます。解は空间GyD.F4y2Ba[0 10]GyD.F4y2Baの時間の関数になります。GyD.F4y2Ba
initcond = [pi / 4 0 pi / 6 0];sols = ode45(m,[010],initcond);GyD.F4y2Ba
状态状态数の解をプロットます。GyD.F4y2Ba
plot(sols.x,sols.y)传奇(GyD.F4y2Ba“\ theta_2”GyD.F4y2Ba那GyD.F4y2Ba'd \ theta_2 / dt'GyD.F4y2Ba那GyD.F4y2Ba'\ theta_1'GyD.F4y2Ba那GyD.F4y2Ba“d \ theta_1 / dt”GyD.F4y2Ba) 标题(GyD.F4y2Ba'金宝搏官方网站状态变量的解决方案'GyD.F4y2Ba)包含(GyD.F4y2Ba'时间''GyD.F4y2Ba) ylabel (GyD.F4y2Ba'金宝搏官方网站解决方案(RAD或RAD / s)'GyD.F4y2Ba)GyD.F4y2Ba

手顺5:驾驶する二重重子のアニメーションの作物GyD.F4y2Ba
振動する二重振子のアニメーションを作成します。GyD.F4y2Ba
最初に,両方の振子の座標を解GyD.F4y2Ba皂GyD.F4y2BaからGyD.F4y2Ba贬GyD.F4y2Baを使用して評価する4つの関数を作成します。GyD.F4y2Ba
X_1 = @(t)l_1 * sin(deval(sols,t,3));y_1 = @(t)-l_1 * cos(deval(sols,t,3));x_2 = @(t)l_1 * sin(deval(sols,t,3))+ l_2 * sin(deval(sols,t,1));Y_2 = @(t)-l_1 * cos(deval(sols,t,3)) - l_2 * cos(deval(sols,t,1));GyD.F4y2Ba
次に,关节GyD.F4y2Ba煽动者GyD.F4y2Baを使のてストップオブジェクトは,1つ目の振り玉ストップアニメーション既定は,GyD.F4y2Ba煽动者GyD.F4y2Baを使用すると,単位时空あたりフレーム数码10としてGyD.F4y2BaT.GyD.F4y2Baの范囲が0から10までまでのアニメーションオブジェクト作作作者GyD.F4y2Ba阴谋GyD.F4y2Baをを用して座标をプロットますますます。GyD.F4y2BaXGyD.F4y2Ba轴とGyD.F4y2BayGyD.F4y2Ba轴轴が同じ长さ长さになるに设定ししように设定しGyD.F4y2Ba
Fanimator(@(t)绘图(x_1(t),y_1(t),GyD.F4y2Ba'ro'GyD.F4y2Ba那GyD.F4y2Ba“MarkerSize”GyD.F4y2Ba,m_1 * 10,GyD.F4y2Ba'markerfacecolor'GyD.F4y2Ba那GyD.F4y2Ba'r'GyD.F4y2Ba));轴GyD.F4y2Ba平等的GyD.F4y2Ba;GyD.F4y2Ba
次に,1つ目の刚体,2つ目の振り玉,および2つ目の刚体棒のアニメーションオブジェクト追加。GyD.F4y2Ba
抓住GyD.F4y2Ba在GyD.F4y2Ba;Fanimator(@(t)绘图([0 x_1(t)],[0y_1(t)],GyD.F4y2Ba'r-'GyD.F4y2Ba));fanimator (@ (t)情节(x_2 (t) y_2 (t)GyD.F4y2Ba'去'GyD.F4y2Ba那GyD.F4y2Ba“MarkerSize”GyD.F4y2Ba,m_2 * 10,GyD.F4y2Ba'markerfacecolor'GyD.F4y2Ba那GyD.F4y2Ba'G'GyD.F4y2Ba));Fanimator(@(t)绘图([x_1(t)x_2(t)],[y_1(t)y_2(t)],GyD.F4y2Ba'G-'GyD.F4y2Ba));GyD.F4y2Ba
关节GyD.F4y2Ba文本GyD.F4y2Baを使用して,経過時間をカウントするテキストを追加します。GyD.F4y2Banum2strGyD.F4y2Baをを使使し时空GyD.F4y2Ba
fanimator (@ (t)文本(-0.3,0.3,GyD.F4y2Ba计时器:“GyD.F4y2Ba+ num2str(t,2))));抓住GyD.F4y2Ba离开GyD.F4y2Ba;GyD.F4y2Ba
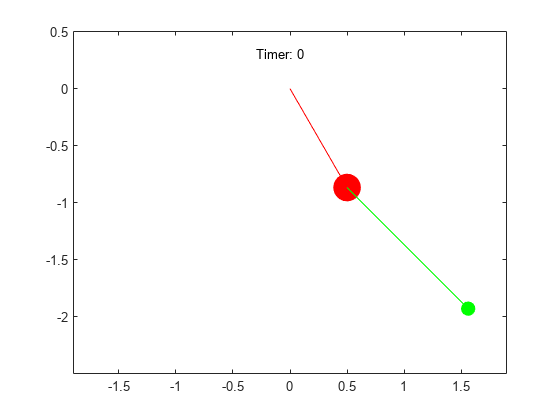
コマンドGyD.F4y2BaPlayanimation.GyD.F4y2Baを使用して二重振子のアニメーションを再生します。GyD.F4y2Ba

选择一个网站GyD.F4y2Ba
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GyD.F4y2Ba。GyD.F4y2Ba
选择GyD.F4y2Ba网站GyD.F4y2Ba你也可以从以下列表中选择一个网站:GyD.F4y2Ba
美洲GyD.F4y2Ba
- 美国拉丁GyD.F4y2Ba(西班牙语)GyD.F4y2Ba
- 加拿大GyD.F4y2Ba(英语)GyD.F4y2Ba
- 美国GyD.F4y2Ba(英语)GyD.F4y2Ba
欧洲GyD.F4y2Ba
- 比利时GyD.F4y2Ba(英语)GyD.F4y2Ba
- 丹麦GyD.F4y2Ba(英语)GyD.F4y2Ba
- 德意志GyD.F4y2Ba(德语)GyD.F4y2Ba
- España.GyD.F4y2Ba(西班牙语)GyD.F4y2Ba
- 芬兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 法国GyD.F4y2Ba(Français)GyD.F4y2Ba
- 爱尔兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 意大利GyD.F4y2Ba(意大利语)GyD.F4y2Ba
- 卢森堡GyD.F4y2Ba(英语)GyD.F4y2Ba
- 荷兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 挪威GyD.F4y2Ba(英语)GyD.F4y2Ba
- Österreich.GyD.F4y2Ba(德语)GyD.F4y2Ba
- 葡萄牙GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞典GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞士GyD.F4y2Ba
- 英国GyD.F4y2Ba(英语)GyD.F4y2Ba
亚太地区GyD.F4y2Ba
- 澳大利亚GyD.F4y2Ba(英语)GyD.F4y2Ba
- 印度GyD.F4y2Ba(英语)GyD.F4y2Ba
- 新西兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 中国GyD.F4y2Ba
- 日本GyD.F4y2Ba(日本语)GyD.F4y2Ba
- 한국GyD.F4y2Ba(한국어)GyD.F4y2Ba