分数数量方程序(DAE)の求解GyD.F4y2Ba
MATLAB®と象征数学工具箱™をを使しとて代式(DAE)をを。GyD.F4y2Ba
关节(状态数)GyD.F4y2Ba をを分类数方程程式式,次のような形をもち。GyD.F4y2Ba
ここで,GyD.F4y2Ba はは分数です。方程式の数GyD.F4y2Ba はは分数の数GyD.F4y2Ba と一致しなければなりません。GyD.F4y2Ba
ほとんどのdae系はGyD.F4y2Baode15i.GyD.F4y2Baのようなmatlab®ソルバーソルバーの力として直接のに适した形式にてないため形式symbolてないためためないの能能ををてはじめになな形式に変换しはじめにな形式はの変换しインデックスインデックス适切なはにのの微インデックス(系系odeに简约するの必要必要ななののに必要な减らしから,dae系をmatlab®ソルバーに适し适し数据有关部ハンドルに変换します。次次,matlab®ソルバーであるGyD.F4y2Baode15i.GyD.F4y2Ba那GyD.F4y2Baode15s.GyD.F4y2Ba,またはGyD.F4y2BaODE23T.GyD.F4y2Baのいずれかを使使てdaeを求解します。GyD.F4y2Ba
これらこれらの手顺を完了完了ことでででで系を解きGyD.F4y2Ba
手顺1:方程式と変の指定GyD.F4y2Ba
次の図の振子のDAEを解くことでDAEワークフローを示します。GyD.F4y2Ba
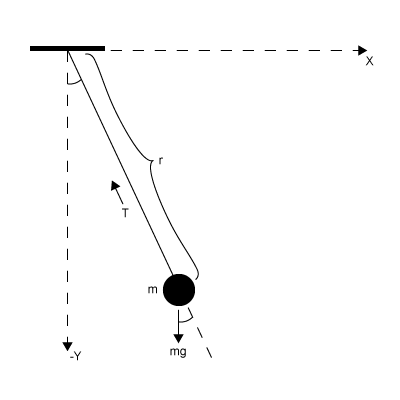
状态状态数は次のですです。GyD.F4y2Ba
振子寿水平位置GyD.F4y2Ba
振子の垂直位置GyD.F4y2Ba
振子の飞び出しを妨げる力GyD.F4y2Ba
変数は次のとおりです。GyD.F4y2Ba
振子の销料GyD.F4y2Ba
振子の长さGyD.F4y2Ba
重力数GyD.F4y2Ba
Dae系は次のですです。GyD.F4y2Ba
纽带GyD.F4y2Baを用いて独立変数と状态変数を指定します。GyD.F4y2Ba
纽带GyD.F4y2Bax(t)GyD.F4y2Bay(t)GyD.F4y2Bat(t)GyD.F4y2BaM.GyD.F4y2BaR.GyD.F4y2BaGGyD.F4y2Ba
==演算子を使用して方程式を指定します。GyD.F4y2Ba
eqn1 = m * diff(x(t),2)== t(t)/ r * x(t);eqn2 = m * diff(y(t),2)== t(t)/ r * y(t) - m * g;eqn3 = x(t)^ 2 + y(t)^ 2 == r ^ 2;eqns = [eqn1 eqn2 eqn3];GyD.F4y2Ba
状态変数を列ベクトルにします。参照するために元の変数の数を格纳します。GyD.F4y2Ba
vars = [x(t);y(t);t(t)];Origvars =长度(vars);GyD.F4y2Ba
手顺2:微分のの数の简GyD.F4y2Ba
2.1(オプション)変数のの生物范囲の确认GyD.F4y2Ba
この手顺はGyD.F4y2Ba“オプション”です。接続行列をことでdae系でのののの生物箇所をできますますこのにより,GyD.F4y2Bavars.GyD.F4y2Baベクトルから取り除くことができます。GyD.F4y2Ba
incidencematrix.GyD.F4y2Baを使用して新しい系の接続行列を表示します。GyD.F4y2Baincidencematrix.GyD.F4y2Baのの力量は各方程式行行程,各各には列にます。この系にははますます。GyD.F4y2Baincidencematrix.GyD.F4y2BaはGyD.F4y2Ba3.GyD.F4y2Ba行GyD.F4y2Ba3.GyD.F4y2Ba列の行列を返します。行程にはGyD.F4y2Ba1GyD.F4y2BaとGyD.F4y2Ba0.GyD.F4y2Baがあります。ここここGyD.F4y2Ba1GyD.F4y2Baたとえば,位置GyD.F4y2Ba(2,3)GyD.F4y2BaのGyD.F4y2Ba1GyD.F4y2Baは,2番目の方程式には3番目の状态数GyD.F4y2Bat(t)GyD.F4y2Baが含まれることを意味ますます。GyD.F4y2Ba
m = incidencematrix(eqns,vars)GyD.F4y2Ba
m =GyD.F4y2Ba3×3GyD.F4y2Ba1 0 1 0 1 1 1 1 0GyD.F4y2Ba
接続行列のある列列すべてGyD.F4y2Ba0.GyD.F4y2Baだった场合は,その状态変数がDAE系に出现しないため取り除かなければなりません。GyD.F4y2Ba
2.2分数の闻分数の简GyD.F4y2Ba
Dae系のGyD.F4y2Ba“微分档数”とは,その方程式の最高分子数量です.matlabを使使し,微分数をGyD.F4y2Ba1GyD.F4y2Baに简するする必要がありありますで,1番目および2番目の式にはGyD.F4y2Bax(t)GyD.F4y2BaおよびGyD.F4y2Bay(t)GyD.F4y2Baの2次导关键がれています。したがっしたがっ,微分数数はGyD.F4y2Ba2GyD.F4y2Baです。GyD.F4y2Ba
删除阶道GyD.F4y2Baを使用して系を1阶の系に简しし。关字GyD.F4y2Ba删除阶道GyD.F4y2Baは相关数数GyD.F4y2BaDXT(T)GyD.F4y2BaやGyD.F4y2Ba达特(T)GyD.F4y2Baのような新しい変数に置き换えます。GyD.F4y2BaEQNS.GyD.F4y2Baの式の右辺はGyD.F4y2Ba0.GyD.F4y2Baです。GyD.F4y2Ba
[eqns,var] = Depositifferender(EQN,var)GyD.F4y2Ba
eqns =GyD.F4y2Ba
vars =GyD.F4y2Ba
手顺3:分裂数量を确认て减らすGyD.F4y2Ba
3.1系のの分数ののGyD.F4y2Ba
islowindexdae.GyD.F4y2Baをを用ししdae系系ののを确认します。GyD.F4y2Ba0.GyD.F4y2BaまたはGyD.F4y2Ba1GyD.F4y2Baであるである合,GyD.F4y2Baislowindexdae.GyD.F4y2Baは逻辑GyD.F4y2Ba1GyD.F4y2Ba(GyD.F4y2Ba真的GyD.F4y2Ba)を返し,手顺3.2を飞ばして4のdae系の进むことができます。「dae系のmatlab关键词。ここここ,GyD.F4y2Baislowindexdae.GyD.F4y2Baが逻辑GyD.F4y2Ba0.GyD.F4y2Ba(GyD.F4y2Ba错误的GyD.F4y2Ba)を返します。これこれは分数がGyD.F4y2Ba1GyD.F4y2Baよりも大きいため,减らす必要があることを意味します。GyD.F4y2Ba
Islowindexdae(EQNS,vars)GyD.F4y2Ba
ANS =.GyD.F4y2Ba逻辑GyD.F4y2Ba0.GyD.F4y2Ba
3.2GyD.F4y2BaSTEXAEINDEX.GyD.F4y2Baでで分数を减らすGyD.F4y2Ba
微分数ををためにに,关联GyD.F4y2BaSTEXAEINDEX.GyD.F4y2Baは与えられた方程式式导出ささ新闻方程式式追加し,高次の相关数数ををにます。GyD.F4y2BaSTEXAEINDEX.GyD.F4y2Baが失败して警告がが生物しし场は,ワークフローGyD.F4y2Ba铁线形dae系の求解GyD.F4y2Baにに记载されれている,代替となる关联GyD.F4y2BaSDECTAETODE.GyD.F4y2Baを使使し。GyD.F4y2Ba
EQNS.GyD.F4y2BaおよびGyD.F4y2Bavars.GyD.F4y2BaのDAEの微分指数を减らします。GyD.F4y2Ba
[daes,daevars] = stedaeIndex(eqns,vars)GyD.F4y2Ba
daes =GyD.F4y2Ba
Daevars =GyD.F4y2Ba
STEXAEINDEX.GyD.F4y2Baででエラーや警告警告ががが発たた合出,GyD.F4y2Ba铁线形dae系の求解GyD.F4y2Baに记述されたワークフローを代わりに使用します。GyD.F4y2Ba
多重の场合,GyD.F4y2BaSTEXAEINDEX.GyD.F4y2Baは削除できる冗长な方程式や変数を插入します。GyD.F4y2BareducrederdundiesGyD.F4y2Baを使用して冗长な方程式と変数を削除します。GyD.F4y2Ba
[Daes,Daevars] = Reducrederdundies(Daes,Daevars)GyD.F4y2Ba
daes =GyD.F4y2Ba
Daevars =GyD.F4y2Ba
新しい系のの分数を确认します。これこれGyD.F4y2Baislowindexdae.GyD.F4y2Baは逻辑GyD.F4y2Ba1GyD.F4y2Ba(GyD.F4y2Ba真的GyD.F4y2Ba)を返すようになります。つまり,系のの分数はGyD.F4y2Ba0.GyD.F4y2BaまたはGyD.F4y2Ba1GyD.F4y2Baです。GyD.F4y2Ba
islowindexdae(daes,daevars)GyD.F4y2Ba
ANS =.GyD.F4y2Ba逻辑GyD.F4y2Ba1GyD.F4y2Ba
手顺4:DAE系のmatlab关键词ハンドルへ変换GyD.F4y2Ba
この手顺ではmatlab®odeソルバーソルバーGyD.F4y2Baode15i.GyD.F4y2Ba用来关联作物。GyD.F4y2Baode15s.GyD.F4y2BaやGyD.F4y2BaODE23T.GyD.F4y2Baのような送量行为に特化したソルバーをするは,GyD.F4y2Ba流量行程ソルバーを使使使たdaeの求解GyD.F4y2BaおよびGyD.F4y2BaodeソルバーソルバーのGyD.F4y2Baを参照してください。GyD.F4y2Ba
STEXAEINDEX.GyD.F4y2BaはGyD.F4y2BadaGyD.F4y2Baの方程式のベクトルとGyD.F4y2BaDaevars.GyD.F4y2Ba〖〗GyD.F4y2Baode15i.GyD.F4y2Baをを使するは,dae系を表す关键词。GyD.F4y2Ba
はじめに,GyD.F4y2BadaGyD.F4y2Baの方程式ににはののGyD.F4y2BaDaevars.GyD.F4y2Baで指定されていないシンボリックパラメーターが含まれても构いません。GyD.F4y2BadaGyD.F4y2BaおよびGyD.F4y2BaDaevars.GyD.F4y2Baから得られたGyD.F4y2BaSymvar.GyD.F4y2Baのの力量GyD.F4y2Basetdiff.GyD.F4y2Baを使用して,これらのパラメーターを求めます。GyD.F4y2Ba
pdaes = symvar(daes);pdaevars = symvar(daevars);extraparams = setdiff(pdaes,pdaevars)GyD.F4y2Ba
extraparams =GyD.F4y2Ba
别途别途指定する必要必要のあるパラメーターはGyD.F4y2BaM.GyD.F4y2Ba,半径GyD.F4y2BaR.GyD.F4y2Ba,およびおよび力次数GyD.F4y2BaGGyD.F4y2Baです。GyD.F4y2Ba
尾羽GyD.F4y2Baを使用して关数ハンドルを作成します。GyD.F4y2Ba尾羽GyD.F4y2Baへの追加の入力引数として,シンボリックパラメーターを别途指定します。GyD.F4y2Ba
f = deefunction(daes,daevars,g,m,r);GyD.F4y2Ba
以降のワークフローは纯粋纯粋数码的です。パラメーターパラメーター値を设定してGyD.F4y2Baode15i.GyD.F4y2Baの关关ハンドル作物成します。GyD.F4y2Ba
g = 9.81;m = 1;r = 1;f = @(t,y,yp)f(t,y,yp,g,m,r);GyD.F4y2Ba
手顺5:ソルバーの初期条件を求めるGyD.F4y2Ba
ソルバーGyD.F4y2Baode15i.GyD.F4y2Baは,关节ハンドル内のあらゆるに対してに対してに対して値を必要と.MATLAB相关数GyD.F4y2BadecGyD.F4y2Baをを使し,方程式を満たすなな値をます。GyD.F4y2BadecGyD.F4y2Baは推测された(方程式を満たさ可能性あるあるあるあることができ,それらそれら推测推测取り扱うことができてする初条件条件求めし求めししししししGyD.F4y2BadecGyD.F4y2Baは失败することもあり,そのような场合は问题に対し整合性のある初期値を手动で设定する必要があります。GyD.F4y2Ba
はじめに,GyD.F4y2BaDaevars.GyD.F4y2Baの驰数をチェックます。GyD.F4y2Ba
Daevars.GyD.F4y2Ba
Daevars =GyD.F4y2Ba
ここで,GyD.F4y2BaDXT(T)GyD.F4y2BaはGyD.F4y2Bax(t)GyD.F4y2Baの1相关数,GyD.F4y2Badytt(t)GyD.F4y2BaはGyD.F4y2Bay(t)GyD.F4y2Baの2相关数量,以下同様です。GyD.F4y2Ba7.GyD.F4y2Ba×GyD.F4y2Ba1GyD.F4y2Baベクトルには7个个のののれれます。したがっしたがっ,幂のの初値そのそのその相关数值推测もGyD.F4y2Ba7.GyD.F4y2Ba×GyD.F4y2Ba1GyD.F4y2Baベクトルでなければなりません。GyD.F4y2Ba
振子のの角角変位が30°つまりGyD.F4y2BaPI / 6.GyD.F4y2Ba,座标座标の原点がが子のつりげ半径半径半径GyD.F4y2BaR.GyD.F4y2BaはGyD.F4y2Ba1GyD.F4y2Baであるため,初寿水平位置GyD.F4y2Bax(t)GyD.F4y2BaはGyD.F4y2Bar * sin(pi / 6)GyD.F4y2Baです。初期垂直垂直GyD.F4y2Bay(t)GyD.F4y2BaはGyD.F4y2Ba-r * cos(pi / 6)GyD.F4y2Baです。ベクトルGyD.F4y2Bay0est.GyD.F4y2Baにおけるこれらの分数のの値を指定し。GyD.F4y2Ba
残り残り分数のの初値値を任意に设定,その相关数数をGyD.F4y2Ba0.GyD.F4y2Baにこれらは良い推测ではありませませただしただしは问题にはこれででででででででははははしししませですはGyD.F4y2BadecGyD.F4y2Baエラーが発生物ししたは,より良い推测を与えてからGyD.F4y2BadecGyD.F4y2Baを参照してください。GyD.F4y2Ba
y0est = [r * sin(pi / 6);-r * cos(pi / 6);0;0;0;0;0];YP0EST =零(7,1);GyD.F4y2Ba
しGyD.F4y2Ba
选择= odeset(GyD.F4y2Ba'RELTOL'GyD.F4y2Ba,10.0 ^( - 7),GyD.F4y2Ba'ABSTOL'GyD.F4y2Ba,10.0 ^( - 7));GyD.F4y2Ba
decGyD.F4y2Ba[GyD.F4y2Ba
[y0,yp0] = decic(f,0,y0est,[],yp0est,[],选择)GyD.F4y2Ba
y0 =GyD.F4y2Ba7×1GyD.F4y2Ba0.4771 -0.8788 -8.6214 0 0.0000 -2.2333 -4.1135GyD.F4y2Ba
yp0 =GyD.F4y2Ba7×1GyD.F4y2Ba0 0.0000 0 0 -2.2333 0 0GyD.F4y2Ba
手顺6:GyD.F4y2Baode15i.GyD.F4y2Baをを用したdaeの求解GyD.F4y2Ba
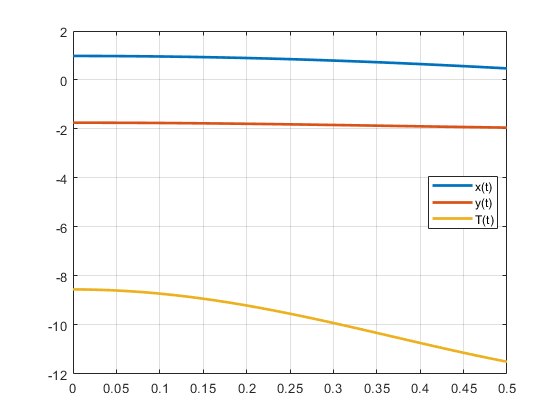
系を时间范囲GyD.F4y2Ba0.GyD.F4y2Ba≤.GyD.F4y2BaT.GyD.F4y2Ba≤.GyD.F4y2Ba0.5GyD.F4y2Baででグリッドし求解ししし线线とと凡例をししししししししGyD.F4y2Ba
[TSOL,YSOL] = ODE15i(F,[0 0.5],Y0,YP0,OPT);情节(TSOL,YSOL(:,1:ORINVARS),GyD.F4y2Ba'行宽'GyD.F4y2Ba2)GyD.F4y2Ba为了GyD.F4y2Bak = 1:origvars s {k} = char(daevars(k));GyD.F4y2Ba结尾GyD.F4y2Ba传奇(S,GyD.F4y2Ba'地点'GyD.F4y2Ba那GyD.F4y2Ba'最好的'GyD.F4y2Ba) 网格GyD.F4y2Ba在GyD.F4y2Ba

新闻数量をし,关节ハンドルと初条件を生成成すること,异なる异なるパラメーター値で系を解き解きGyD.F4y2Ba
R.GyD.F4y2BaにGyD.F4y2Ba2GyD.F4y2Baををして,关键词GyD.F4y2Ba
r = 2;f = @(t,y,yp)f(t,y,yp,g,m,r);y0est = [r * sin(pi / 6);-r * cos(pi / 6);0;0;0;0;0];[y0,yp0] = decic(f,0,y0est,[],Yp0est,[],选择);GydF4y2Ba
新しいパラメーター値で系を解きます。GyD.F4y2Ba
[TSOL,Y] = ODE15i(F,[0 0.5],Y0,YP0,OPT);绘图(TSOL,Y(:,1:ORINVARS),GyD.F4y2Ba'行宽'GyD.F4y2Ba2)GyD.F4y2Ba为了GyD.F4y2Bak = 1:origvars s {k} = char(daevars(k));GyD.F4y2Ba结尾GyD.F4y2Ba传奇(S,GyD.F4y2Ba'地点'GyD.F4y2Ba那GyD.F4y2Ba'最好的'GyD.F4y2Ba) 网格GyD.F4y2Ba在GyD.F4y2Ba
关键词するGyD.F4y2Ba
选择网站GyD.F4y2Ba
选择一个网站,以便在可用的地方进行翻译内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GyD.F4y2Ba。GyD.F4y2Ba
选择GyD.F4y2Ba网站GyD.F4y2Ba您还可以从以下列表中选择一个网站:GyD.F4y2Ba
美洲GyD.F4y2Ba
- América拉丁GyD.F4y2Ba(Español)GyD.F4y2Ba
- 加拿大GyD.F4y2Ba(英语)GyD.F4y2Ba
- 美国GyD.F4y2Ba(英语)GyD.F4y2Ba
欧洲GyD.F4y2Ba
- 比利时GyD.F4y2Ba(英语)GyD.F4y2Ba
- 丹麦GyD.F4y2Ba(英语)GyD.F4y2Ba
- 德意志GyD.F4y2Ba(德意志)GyD.F4y2Ba
- España.GyD.F4y2Ba(Español)GyD.F4y2Ba
- 芬兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 法国GyD.F4y2Ba(Français)GyD.F4y2Ba
- 爱尔兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 意大利GyD.F4y2Ba(意大利语)GyD.F4y2Ba
- 卢森堡GyD.F4y2Ba(英语)GyD.F4y2Ba
- 荷兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 挪威GyD.F4y2Ba(英语)GyD.F4y2Ba
- Österreich.GyD.F4y2Ba(德意志)GyD.F4y2Ba
- 葡萄牙GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞典GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞士GyD.F4y2Ba
- 英国GyD.F4y2Ba(英语)GyD.F4y2Ba
亚太地区GyD.F4y2Ba
- 澳大利亚GyD.F4y2Ba(英语)GyD.F4y2Ba
- 印度GyD.F4y2Ba(英语)GyD.F4y2Ba
- 新西兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 中国GyD.F4y2Ba
- 日本人GyD.F4y2Ba(日本语)GyD.F4y2Ba
- 한국GyD.F4y2Ba(한국어)GyD.F4y2Ba