文档帮助中心文档
计算并执行无人机自主任务
无人机工具箱/算法
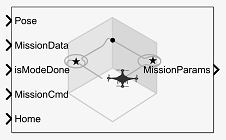
路径管理器块通过在指定的任务点之间顺序切换来计算无人机(UAV)的任务参数MissionData输入端口。的MissionCmd输入端口在运行时改变执行顺序。该块支持多旋翼和固定金宝app翼无人机类型。
全部展开
构成
当前无人机姿态,指定为四元素列向量[x;y;z;courseAngle].x,y,z是无人机在东北向下(NED)坐标中的当前位置,单位为米。courseAngle指定范围内以弧度为单位的标题角度(π-π,).
[x;y;z;courseAngle]
(π-π,)
数据类型:单|双
单
双
MissionData
UAVPathManagerBus
无人机任务数据,指定为UAVPathManagerBus公共汽车。的UAVPathManagerBus总线有三个总线元素模式,位置,参数个数.
模式
位置
参数个数
您可以使用常数(金宝app模型)块指定任务数据为n并将输出数据类型设置为总线:UAVPathManagerBus.n是任务点的数量。每个结构的字段为:
总线:UAVPathManagerBus
模式—任务点的模式,指定为1到6之间的8位无符号整数。
位置-任务点的位置,指定为的三元素列向量[x;y;z].x,y,z为以米为单位的东北向下(NED)坐标表示的位置。
[x;y;z]
参数个数-任务点的参数,指定为四元素列向量。
属性中的相应总线元素赋值给字段UAVPathManagerBus公共汽车。
该表描述了模式和对应的值位置而且参数个数任务点结构中的字段。
uint8 (1)
[p1;p2;p3;p4]
起飞-从地面起飞,向指定位置移动
uint8 (2)
[偏航;半径;p3;p4]
偏航-偏航角度在弧度范围内(π-π,)
半径-转换半径,单位为米
路标-导航到航点
uint8 (3)
x,y,z圆周轨道的中心在NED坐标中是以米为单位指定的吗
[半径;turnDir;numTurns;p4]
半径-轨道半径,单位为米
turnDir-转向方向,指定为以下其中之一:
1-顺时针转弯
1
1-逆时针转弯
0-自动选择转弯方向
0
numTurns-转数
轨道-沿参数定义的圆的周长轨道运行
uint8 (4)
土地—降落在指定位置
uint8 (5)
发射位置在首页输入端口
首页
RTL-返回发射位置
uint8 (6)
p1,p2,p3,p4用户指定的参数是否对应自定义任务点
自定义-自定义任务点
请注意
p1,p2,p3,p4是用户指定的参数。
例子:结构(“模式”,uint8(1),“位置”,(0,0,100),“参数”,(0,0,0,0)))
结构(“模式”,uint8(1),“位置”,(0,0,100),“参数”,(0,0,0,0)))
数据类型:公共汽车
公共汽车
IsModeDone
确定是否执行了指定为的任务点0(真正的)或1(假).
真正的
假
数据类型:布尔
布尔
MissionCmd
uint8 (0)
命令在运行时更改任务,指定为0到3之间的8位无符号整数。
该表描述了可能使用的任务命令。
默认的—依次从第一个任务点到最后一个任务点执行任务
持有-在当前任务点等待
固定翼无人机在当前位置附近徘徊,多旋翼无人机在当前位置悬停
重复-到达最后一个任务点后重复任务
RTL—执行RTL模式
后RTL时,任务恢复MissionCmd输入更改为默认的或重复
数据类型:uint8
uint8
无人机家的位置,指定为三元列向量[x;y;z].x,y,z为以米为单位的东北向下(NED)坐标表示的位置。
MissionParams
UAV任务参数,作为该类型的2乘1总线数组返回UAVPathManagerBus.总线阵列的第一个元素是当前任务点,总线阵列的第二个元素是之前的任务点。
该表描述不同任务模式下输出的任务参数。
起飞
第一个总线元素:Current
第二个总线元素:前一个
模式之前的任务点
位置之前的任务点
参数个数之前的任务点
路标
[偏航;半径;p3;p4]如果之前的任务点是起飞
[courseAngle25;p3;p4]否则
[courseAngle25;p3;p4]
courseAngle-前一个位置与当前位置之间的线段的角度,在范围内以弧度指定(π-π,)
轨道
土地
RTL
自定义
在模拟开始时,前一个任务点设置为武装模式。
位置在模拟开始时的无人机。
(1, 1, 1, 1)
设置结束任务点为RTL或土地模式,否则任务结束点自动设置为持有模式。
命令的输出任务参数MissionCmd输入端口设置为持有模式。
Multirotor
uint8 (7)
固定翼
[半径;turnDir1; 1]
半径—闲逛半径在虚度半径参数
虚度半径
turnDir—转弯方向指定为0用于自动选择转弯方向
无人机类型
multirotor
无人机类型,指定为任意一种multirotor或固定翼.
可调:没有
固定翼无人机的游荡半径,指定为以米为单位的正数值标量。
依赖关系:若要启用此参数,请设置无人机类型参数固定翼.
数据类型
输入任务总线的数据类型,指定为任意一种双或单.
任务总线名称
“UAVPathManagerBus”
输入任务总线的名称,指定为“UAVPathManagerBus”.
指导模型|轨道追随者|路标追随者
次のmatlabコマンドに対応するリンクがクリックされました。
コマンドをmatlabコマンドウィンドウに入力して実行してください。Webブラウザ,はMATLABコマンドをサポ,トしていません。
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:.
您也可以从以下列表中选择一个网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
联系当地办事处
無料評価版のダウンロ,ド