愿景。BlockMatcher
イメージ間またはビデオフレーム間の動きの推定
作成
説明
blkMatcher=愿景。BlockMatcherblkMatcher? ? ? ?このオブジェクトは,探索領域上でピクセルのブロックを動かし,ブロックマッチング法を使用してこの推定を実行します。
blkMatcher=愿景。BlockMatcher (名称,值)blkMatcher =视觉。BlockMatcher (“ReferenceFrameSource”,输入端口的)啊哈!
プロパティ
使用法
説明
入力引数
出力引数
オブジェクト関数
。,objという名前の系统对象のシステムリソースを解放するには,次の構文を使用します。
发行版(obj)
例
BlockMatcher
。
im2gray(im2gray(imread))“onion.png”)));
。
HBM =视觉。BlockMatcher (“ReferenceFrameSource”,…输入端口的,“BlockSize”35 [35]);hbm。OutputValue =“复杂形式的水平和垂直组件”;halphablend = vision.AlphaBlender;
[55]。
Img2 = imtranslate(img1,[5,5]);
2 .。
运动= hbm(img1,img2);
2 .。
Img12 = halphablend(img2,img1);
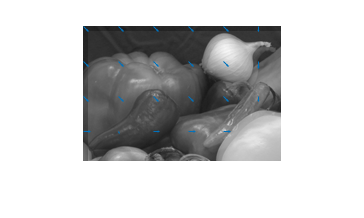
箭袋プロットを使用してイメージの動きの方向を示します。
(X, Y) = meshgrid(1时35:抵达大小(img1, 2), 1时35:抵达大小(img1, 1));imshow (img12)在箭袋(X (:), Y(:),真正的(运动(:)),图像放大(运动(:)),0)从