このページの翻訳は最新ではありません。ここをクリックして、英語の最新版を参照してください。
structure from motion
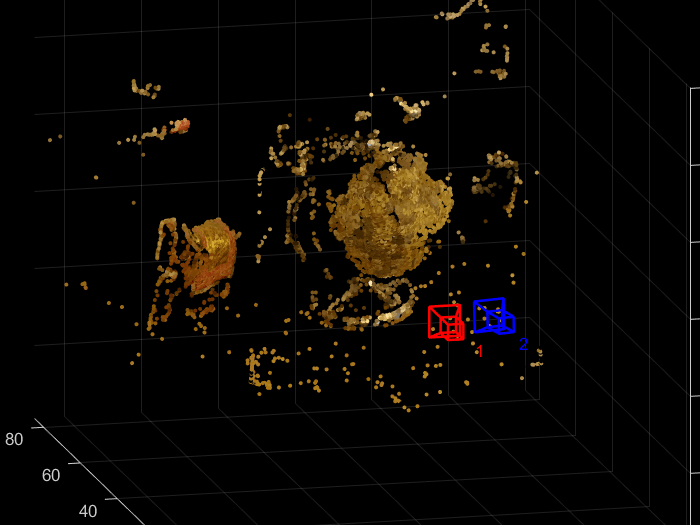
structure from motion (SfM) は、一連の 2 次元イメージから 3 次元シーンの構造を推定するプロセスです。詳細については、Implement Visual SLAM in MATLABを参照してください。
アプリ
| カメラ キャリブレーター | 単一カメラの幾何学的パラメーターの推定 |
| ステレオ カメラ キャリブレーター | ステレオ カメラの幾何学的パラメーターの推定 |
関数
トピック
カメラ キャリブレーション用アプリ
カメラの内部パラメーター、外部パラメーターおよびレンズ歪みパラメーターを推定します。
ステレオ カメラのキャリブレーションを行います。キャリブレーション済みのカメラはイメージの深度の復元に使用できます。
ビジュアル オドメトリ
イメージのシーケンスを解析してカメラの位置と向きを特定する。
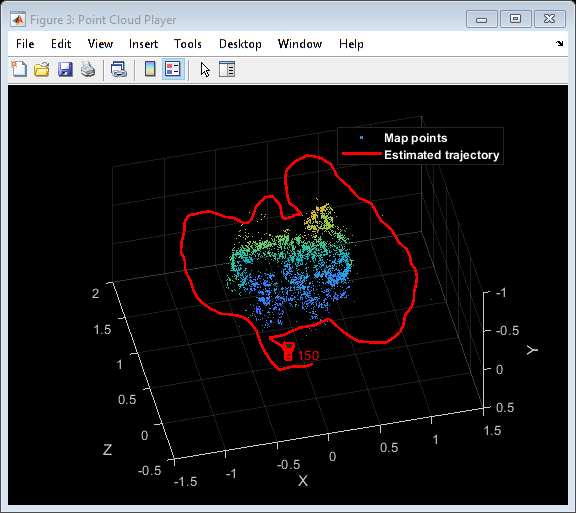
単眼の Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM)。
基礎
ピクセル インデックス、空間座標および 3 次元座標系の指定
いくつかの種類の特徴の点オブジェクトを返したり受け入れたりする関数の選択
局所特徴の検出と抽出の利点と用途の学習
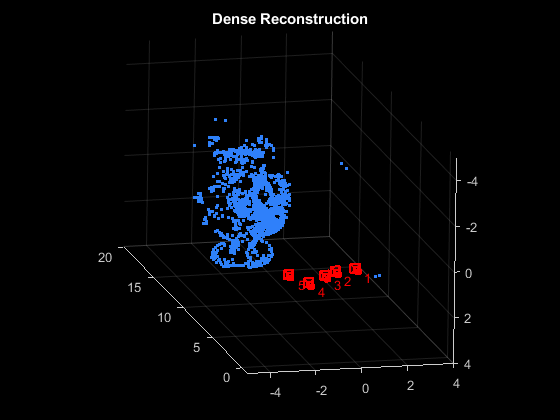
2 次元のイメージ シーケンスから 3 次元構造を推定する
Implement Visual SLAM in MATLAB
Understand the visual simultaneous localization and mapping (vSLAM) workflow and how to implement it using MATLAB.
注目の例
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:.
Selectweb siteYou can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)
