。
深层学习を使使用した网页カメラカメラの分享
00
MATLAB®,シンプルな网页カメラ,および深层ニューラルネットワークを使て,身の回りの物を识别しししししますししししししししこのます事前事前习をのの深层ニューラルニューラル(CNNまたはCROMNET)は,100万枚を超えるイメージについて习済みであり,イメージを1000个のオブジェクトカテゴリ(キーボード,マグカップ,铅笔,多重の动物など)に分类できます.Googlenetををダウンロード,matlabを使用してカメライメージをリアルタイムで连続的にに处でき。
googlenetは広范囲のイメージに対するな特徴表现を习ししいますます入入イメージを取り,イメージ内のオブジェクトラベルラベル各カテゴリの确率を表示し。がどの程度正确にさますますますますますははははははははますだけでなく表示はますだけでなくでししししリアル表示ししできできできできできできできできできできできできできできできできできできできできできできできできできできできできできできできできできににににににににににににににににににににににににににににににににににににににににににににににににににににににににににににににににににににには
カメラおよび事前学习済みのネットワークの読み込み
カメラを接続し,事前学习済みのgooglenetネットワークネットワークは読み込みます事前习手顺はののの习済みにのネットワークをを使この例に,MATLAB支持包,MA金宝appTLAB支持包,用于USB网络摄像头,および深度学习工具箱™模型对于Googlenet网络が必要なサポートパッケージがインストールさていいない场れれれななサポートない场されれななサポートサポート表示れれれ
Camera =网络摄像头;net = googlenet;
例をもう一流传行するする合,まずコマンド清晰的相机を実行し。ここここ,相机は网页カメラへのです。そうしそうしない合,同じ网页カメラへの新闻接続は作物できため,エラーが表示さます。
カメラのスナップショットの分享
イメージを分类するに,ネットワークネットワークの力サイズにててイメージサイズサイズしなければなりません。输入イメージイメージ最初は取得ますのの层は。
InputSize = Net.Layers(1).Inputsize(1:2)
InputSize = 224 224
カメラカメライメージを,予测ラベルとその确率と共に表示します。分类を呼び出す前に,ネットワークネットワークの力サイズにわせててのサイズ変更し
图IM =快照(相机);图像(IM)IM = IMResize(IM,InputSize);[标签,得分] =分类(网络,IM);标题({char(标签),num2str(max(得分),2)});

カメラのイメージの连続的な分享
が终了するたびにdrawnをを用して图を新新します。
h =图;尽管Ishandle(h)im =快照(相机);图像(IM)IM = IMResize(IM,InputSize);[标签,得分] =分类(网络,IM);标题({char(标签),num2str(max(得分),2)});drawn结尾
上位の予测の表示
その确率を表示できます。
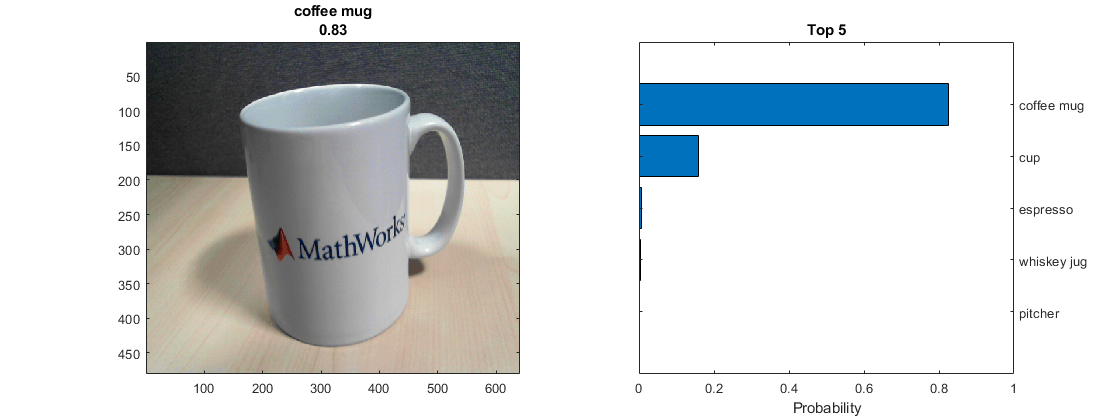
カメラのスナップををますますのを,予测ラベルとその确率と共にしますます。关联分类の分数出力を使使,上位5つのについて确率ヒストグラムををします。
图ウィンドウを作用成しまず,幅が2倍になるようウィンドウのサイズを変更し,2つのサブプロットを変更て,2。
h =图;H.Position(3)= 2 * H.Position(3);AX1 =子图(1,2,1);AX2 =子图(1,2,2);
左のサブに,イメージイメージ分享をまとめてしますます。
IM =快照(相机);图像(AX1,IM)IM = IMRESIZE(IM,INPUTSIZE);[标签,得分] =分类(网络,IM);标题(Ax1,{char(标签),num2str(max(得分),2)});
スコアの高度クラスをして,上位5つの予测を选択します。
[〜,IDX] =排序(得分,“下降”);IDX = IDX(5:-1:1);classes = net.layers(结束).classes;classnamestop = string(类(idx));scoretop =得分(Idx);
上位5つの予测をヒストグラム表示します。
Barh(Ax2,Scoretop)XLIM(AX2,[0 1])标题(AX2,'前5')Xlabel(Ax2,'可能性')YTicklabels(AX2,ClassNamestop)Ax2.yaxisLocation ='对';
イメージの连続的ななと上位の予测表示
,単に图を闭じます。反复反复が终了するたびたびdrawnをを用して图を新新します。
图ウィンドウを作品成し。まず,幅が2倍になるようウィンドウのサイズを変更し,2つのサブプロットをします。座标轴のサイズが変更されようするにはれにするには,位置混合物プロパティを'InnerPosition'に设定します。
h =图;H.Position(3)= 2 * H.Position(3);AX1 =子图(1,2,1);AX2 =子图(1,2,2);Ax2.PositionConstraint =.'InnerPosition';
上位5つの予测のヒストグラムイメージと共に连続连続表示表示表示してててししししします。
尽管ishandle(h)%显示并分类图像IM =快照(相机);图像(AX1,IM)IM = IMRESIZE(IM,INPUTSIZE);[标签,得分] =分类(网络,IM);标题(Ax1,{char(标签),num2str(max(得分),2)});%选择前五个预测[〜,IDX] =排序(得分,“下降”);IDX = IDX(5:-1:1);scoretop =得分(Idx);classnamestop = string(类(idx));%绘制直方图Barh(Ax2,Scoretop)标题(AX2,'前5')Xlabel(Ax2,'可能性')XLIM(AX2,[0 1])YTicklabels(AX2,ClassNamestop)AX2.yaxisLocation ='对';drawn结尾
参考
关键词トピック
您还可以从以下列表中选择一个网站:
