ドキュメンテーションヘルプセンタードキュメンテーション
このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
この例では4象限チョッパーを制御する方法を説明します。控制サブシステムは,出力電流を制御するために,単純なπベースの制御アルゴリズムを実装します。シミュレーションを高速化するために,平均値チョッパーモデルを使用します。シミュレーションでは,正と負の両方の指令値を使用します。合計シミュレーション時間(t)は1秒です。t = 0.5秒で,負荷直流電源Eの極性が変更されます。
この例では,昇降圧コンバーターの出力電圧を制御する方法を説明します。デューティ比を調整するために,控制サブシステムはπベースの制御アルゴリズムを使用します。シミュレーションを高速化するために,平均値直流-直流コンバーターモデルを使用します。入力電圧およびシステム負荷は,シミュレーション全体を通じて一定に維持されます。合計シミュレーション時間(t)は0.25秒です。t = 0.15秒で基準電圧が変化し,システムは降圧モードから昇圧モードに切り替わります。
この例では,昇圧コンバーターの出力電圧を制御する方法を説明します。デューティ比を調整するために,控制サブシステムはπベースの制御アルゴリズムを使用します。入力電圧はシミュレーション全体を通じて一定と見なされます。可変抵抗器がシステムに負荷を提供します。合計シミュレーション時間(t)は0.25秒です。t = 0.15秒で負荷が変化します。
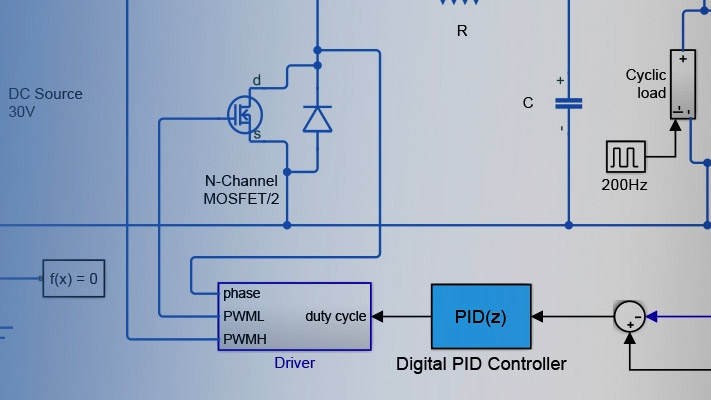
この例では30 v直流電源を,制御された15 v直流電源に変換するスイッチング電源をモデル化する方法を説明します。このモデルを使用して,インダクタンスLおよび平滑化コンデンサCのサイズ決定と,フィードバックコントローラーの設計の両方ができます。連続コントローラーと離散コントローラーの間で選択することにより,離散化の影響を調べることができます。
この例では,多項式RSTコントローラーを使用して降圧コンバーターの出力電圧を制御する方法を説明します。RSTコントローラーはデューティ比を調整します。入力電圧はシミュレーション全体を通じて一定と見なされます。可変抵抗器がシステムに負荷を提供します。合計シミュレーション時間(t)は0.25秒です。t = 0.15秒で負荷が変更されます。t = 0.2秒で,基準電圧は6 vから4 vに変更されます。
この例では,同期整流式降圧コンバーターにおけるMOSFETの熱力学をモデル化します。その構造は,熱力学を伴う同期整流式降圧コンバーターモデル(> > ee_switching_power_supply_thermal)と一致しています。電気的なスイッチングダイナミクスを省略することによって,シミュレーションで使うタイムステップをずっと大きくし,シミュレーションでMOSFETの定常温度を計算する時間を劇的に削減できます。
この例では,降圧コンバーターの出力電圧を制御する方法を説明します。デューティ比を調整するために,控制サブシステムはπベースの制御アルゴリズムを使用します。入力電圧はシミュレーション全体を通じて一定と見なされます。可変抵抗器がシステムに負荷を提供します。合計シミュレーション時間(t)は0.25秒です。t = 0.15秒で負荷が変化します。
この例では,スイッチング電源の動作に対するコンポーネントの許容誤差と故障イベントの影響をモデル化して評価する方法を説明します。C R, L,およびの各コンポーネントにはすべて,許容誤差,動作範囲,および故障が定義されています。故障はブロックダイアログ内で有効にするか,またはMATLAB®コマンドを使用して有効にできます。コンデンサの故障は,1.5 e - 3秒で割り込むよう,あらかじめ有効になっています。
この例では30 v直流電源を,制御された15 v直流電源に変換するスイッチング電源をモデル化する方法を説明します。このモデルを使用して,インダクタンスLおよび平滑化コンデンサCのサイズ決定と,フィードバックコントローラーの設計の両方ができます。連続コントローラーと離散コントローラーの間で選択することにより,離散化の影響を調べることができます。スイッチングデバイスを理想的なスイッチではなくMOSFETとしてモデル化することで,デバイスのオン抵抗が確実に正しく表現されます。また,このモデルは,デバイスのスイッチオンとスイッチオフのタイミングを捉えます。これは主に,ゲートの静電容量値と,PWMドライバーの出力抵抗に依存します。
この例では,周波数制御付きのクラスEパワーコンバーターを示します。金宝app仿真软件®の控制器ブロックには単純な積分制御が実装されており,5Ωの負荷に100 Wを入力するよう設計されています。スイッチはLDMOS(非線形静電容量モデルを備えた高電圧トランジスタ)で,R反式は変圧器の等価の直列抵抗です。输出スコープは,スイッチにかかる電圧ストレスを評価するためのドレイン電源電圧を示しています。トランジスタの非線形出力静電容量により,ピーク電圧ストレスは,出力静電容量が一定である場合に予想される値よりも大きくなることに注意してください。さらに,スコープには,周波数制御信号,出力電圧、および出力電圧の参照値が示されます。このモデルを使用して,回路のコンポーネントからの出力電力情報を計算できます。
この例では,ソース上のコモンモードと差動モードのノイズ測定用に構成された降圧コンバーターを示します。コモンモードのノイズをシミュレートするには,回路と基準平面の間の容量結合をモデルに含めなければなりません。この回路には,スイッチングノード間の静電容量(高側と低側のトランジスタ間)と基準平面も含まれています。
この例では,周波数制御付きの直流-直流LLC電力コンバーターを示します。金宝app仿真软件®の控制器ブロックには単純な積分制御が実装されており,変数Vout_nominalによって定義される定格出力電圧値を達成できるよう設計されています。输出スコープには,周波数制御信号,出力電圧、および出力電圧の参照値が示されます。起動時に,参照値が目標の設定値まで増大します。LLCパワートレインの設計は,第1次高調波の近似を使用して自動的に計算されます。
この例では2象限チョッパーを制御する方法を説明します。この2象限チョッパーは第1象限と第4象限で動作し,正と負の出力電圧が許可されます。控制サブシステムは,出力電流を制御するために,単純なπベースの制御アルゴリズムを実装します。合計シミュレーション時間(t)は0.5秒です。t = 0.25秒で,負荷直流電源Eの極性が変更されます。
この例では2象限チョッパーを制御する方法を説明します。この2象限チョッパーは第1象限と第2象限で動作し,正と負の出力電流が許可されます。控制サブシステムは,出力電流を制御するために,単純なπベースの制御アルゴリズムを実装します。システムの負荷はシミュレーション全体を通じて一定と見なされます。
このモデルでは,フライバックコンバーターを使用して5 V直流電源を15 V直流の制御された電源にステップアップする方法を示します。変圧器の1次巻線にかかる時変電圧を作成することで,電圧を増大させます。変圧器によって電圧がステップアップされた後で,ダイオードによって電圧が整流されて直流に戻されます。出力電圧に対する閉ループ制御は,1次側のスイッチング周波数を制御することで影響を受けます。
この例では4象限チョッパーを制御する方法を説明します。控制サブシステムは,出力電流を制御するために,単純なπベースの制御アルゴリズムを実装します。シミュレーションでは,正と負の両方の指令値を使用します。合計シミュレーション時間(t)は1秒です。t = 0.5秒で,負荷直流電源Eの極性が変更されます。
この例では4スイッチ昇降圧コンバーターの出力電圧を制御する方法を説明します。デューティ比を調整するために,控制サブシステムはπベースの制御アルゴリズムを使用します。昇圧と降圧のどちらのモードでも,1つのスイッチがデューティ比を制御し,1つは逆に操作され,他の2つは固定位置に保持されます。入力電圧およびシステム負荷は,シミュレーション全体を通じて一定と見なされます。合計シミュレーション時間(t)は0.25秒です。t = 0.15秒で,基準電圧が変化し,システムは降圧モードから昇圧モードに切り替わります。
この例では,線形電流レギュレーターに基づく领导ドライバーを示します。スコープは,光出力と電流出力,および供給電圧を示します。約12 Vを超える供給電圧に対して,出力が制御されます。
この例では,離散コンポーネントから作成された,単純な電圧レギュレーター回路を示します。20 V直流に1 Vの正弦波変動を加えた,変動する電源がモデル化されています。ツェナーダイオードD1は,オペアンプの非反転入力を3.2 Vに設定します。オペアンプのゲインは大きいため,オペアンプの反転入力と反転出力も3.2 Vになります。したがって,制御器の出力電圧は3.2 * (1000 + 470)/ 470 = 10 Vに調整されます。典型的なオペアンプによって可能な値よりも大きな電流を提供するには,NPN型バイポーラトランジスタが必要です。このモデルを使用して回路の動作を確認し,また必要な電圧制御を得るためのコンポーネントの選択に役立てることができます。
この例では,パフォーマンスが負荷電流と温度の両方に依存する,低コストの電圧レギュレーターの回路を示します。バイアス抵抗器R1により,トランジスタベースの電圧が定格ツェナー電圧に近くなることが保証されます。制御器の出力電圧もおよそこの電圧で,ベース——エミッター電圧は10分の数ボルトになります。正確なベース——エミッター電圧は,トランジスタの作業点に依存し(その作業点は負荷に依存),また温度にも依存します。抵抗器R2は,過渡出力の短絡の際にいくらかの保護を行う役割のみを果たします。
このモデルでは,保護回路の動作を調べるために,パワーコンバーターのMOSFETに故障を適用する方法を示します。MOSFETが故障状態になると,負荷にかかる出力電圧をクランプするためにクローバー回路が有効になり,やがてヒューズが飛びます。
この例では1象限チョッパーを制御する方法を説明します。控制サブシステムは,出力電流を制御するために,単純なπベースの制御アルゴリズムを実装します。
この例では,プッシュプル降圧コンバーターの出力電圧を制御する方法を説明します。インダクターを流れる電流がゼロになることはないため,この直流-直流コンバーターは連続伝導モード(CCM)で動作します。定格出力電圧への変換と維持のために,PI控制器サブシステムでは単純な積分制御を使用します。起動時に,基準電圧が目的の出力電圧まで上昇します。
この例では,プッシュプル降圧コンバーターの出力電圧を制御する方法を説明します。インダクターを流れる電流は,MOSFETのスイッチオフサイクル中にゼロに達するため,この直流-直流コンバーターは不連続伝導モード(DCM)で動作します。この伝導モードは,主に低電力の用途で使用されます。入力直流電圧を定格出力電圧に変換して維持するために,PI控制器サブシステムでは単純な積分制御を使用します。起動時に,基準電圧が目的の出力電圧まで上昇します。
このモデルでは,差動サージによる過電圧からスイッチング用MOSFETを保護するために,降圧コンバーターにバリスターを適用する方法を説明します。
このモデルは,Simscape™电气™ダイオードをパラメーター化して過渡電圧抑制(电视)ダイオードをパラメーター化する方法を示します。この例は,誘導負荷の切断に関連する電圧過渡現象から自動車のエレクトロニクスを保護する用途に適した电视ダイオード用です。データシートから抽出したデータを表示するには,[モデル化]タブの[設定]セクションで,[モデル設定],[モデルプロパティ]をクリックします。[コールバック]タブで,[PreLoadFcn]をクリックします。
この例では,电源コンバーターでさまざまなレベルの忠実度を使用する方法を説明します。システムには3つの昇降圧コンバーターが含まれています。一番上のコンバーターは,10我们のサンプル時間で理想的なスイッチを使用します。美国50州のサンプル時間でモデルのサンプリングが不十分な場合でも正確な結果が得られるように,真ん中のコンバーターは,平均化されたスイッチと平均化されたパルスを使用します。サンプルレートをさらに上げて理想的な平均化されたコンバーターとして運用するために,一番下のコンバーターは平均化されたスイッチを使用し,ゲートパルスの代わりにデューティ比を使用します。控制サブシステムにはPWM発生器が含まれています。范围サブシステムには,シミュレーション結果を確認できる范围ブロックが含まれています。
この例では,チョッパーコンバーターでさまざまなレベルの忠実度を使用する方法を説明します。システムには4象限チョッパーが3つ含まれています。最上位のコンバーターは,10我们のサンプル時間で理想的なスイッチを使用します。美国50州のサンプル時間でモデルのサンプリングが不十分な場合でも正確な結果が得られるように,真ん中のチョッパーは,平均化されたスイッチと平均化されたパルスを使用します。サンプルレートをさらに上げて理想的な平均化されたチョッパーとして運用するために,一番下のコンバーターは平均化されたスイッチを使用し,ゲートパルスの代わりにデューティ比を使用します。控制サブシステムにはPWM発生器が含まれています。范围サブシステムには,シミュレーション結果を確認できる范围ブロックが含まれています。
この例では,LLC共振直流-直流コンバーターの一部のコンポーネントに許容誤差がある場合に,Simscape™电气™を使用してモンテカルロ解析を実行し,コンバーターの設計を最適化する方法を説明します。
この例では,単相インバーターシステムで電流を制御する方法を説明します。単相インバーターは,変調波形によって電力を供給される平均化されたスイッチを使用します。この例は,専用のリアルタイムエミュレーターのリアルタイム評価に適しています。
次のMATLABコマンドに対応するリンクがクリックされました。
コマンドをMATLABコマンドウィンドウに入力して実行してください。WebブラウザーはMATLABコマンドをサポートしていません。
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系