このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
4つの油圧シリンダーのシミュレーション
Simuli金宝appnk®を使はて4つの油圧シリンダーをモデルを作物ををを。1つのシリンダーのモデルおよび荷重制約をもつ2つのシリンダーのモデルを参照してください。
メモ:これは基本的な水力学の例です。Simscape™动力传动系统™とSimscape液体™を使用して,水力学モデルや自動車のモデルをより簡単に作成できます。
Simscape液体は流体システムのモデル化とシミュレーションのためのコンポーネントライブラリを提供します。これには,ポンプ,バルブ,アクチュエータ,パイプライン,熱交換器のモデルが含まれます。これらのコンポーネントを使用して,フロントローダー,パワーステアリング,着陸装置の作動システムといった流体電力システムを開発することができます。Simscape液体を使用すると,エンジン冷却システムおよび燃料供給システムも開発できます。Simscape製品ファミリで利用可能なコンポーネントを使用して,機械システム,電気システム,熱システム,およびその他のシステムを統合することができます。
Simscape动力传动系统は1次元機械システムのモデル化とシミュレーションのためのコンポーネントライブラリを提供します。これには,ウォームギア,遊星歯車,親ねじ,およびクラッチといった回転コンポーネントや並進コンポーネントのモデルが含まれます。これらのコンポーネントを使用すると,ヘリコプターのドライブトレイン,産業機械,車両のパワートレイン,およびその他のアプリケーションにおける機械入力の送信をモデル化できます。エンジン,タイヤ,トランスミッション,トルクコンバーターなどの車載コンポーネントも含まれます。
モデル化
図1はモデルの最上位のブロック線図を示しています。このモデルには1つのポンプと4つのアクチュエータがあります。同じポンプ圧(p1)で各シリンダーアセンブリが駆動され,その流量の合計がポンプに負荷をかけます。4つの制御バルブはそれぞれ個別に制御可能ですが,アクティブサスペンションシステムの場合がそうであるように,4つすべての制御バルブが同じコマンド(オリフィス面積がゼロから0.002平方米。へと線形増加)を受信します。
モデルを開いてシミュレーションを実行
このモデルを開くには,MATLAB®端末に”sldemo_hydcyl4“と入力します(MATLABヘルプを使用している場合は,ハイパーリンクをクリックします)。モデルツールバーの[再生]ボタンをクリックしてシミュレーションを実行します。
メモ:このモデルは,MATLABワークスペースの仿真软金宝app件。SimulationOutputオブジェクト
出に関連データのログを作成します。信号のログデータはsldemo_hydcyl4_outputという構造体の出内に格納されます。ログが作成された信号には青いインジケーターが付きます(モデルを参照)。信号ログの詳細は,金宝app仿真软件ヘルプを参照してください。



図1:4つのシリンダーのモデルとシミュレーション結果
モデルの説明
ポンプ流量は0.005立方米/秒(1つのシリンダーのモデルとちょうど同じ)から始まり,t = 0.05秒で0.0025立方米/秒まで減少します。パラメーターC1、C2、Cd、ρ,およびV30は,1つのシリンダーのモデルと同じです。しかし,K、一个,およびbetの個々の値を仮定することにより,4つのシリンダーはそれぞれ異なる遷移応答を示します。以下の表は4つのアクチュエータの特性を示しています。
---------------------------------------------------------------- 参数| Actuator1 Actuator2Actuator3Actuator4----------------|----------------------------------------------- 春天常数|KK / 44 kK活塞区域|交流Ac / 44 ac交流散装模量|ββββ/ 1000---------------------------------------------------------------- β= 7 e8 Pa(液体体积弹性模量)K = 5e4 N/m[弹簧常数]Ac = 1e-3 m^2[圆柱横截面积]
面積とバネ定数の比はすべてのピストンで同じであるため,定常状態出力もすべて同じはずです。各アクチュエータサブシステムの主要な時定数は,以下に比例します。
![]()
(これは次元解析から得られた結果です)。したがって,ピストンアセンブリ2はアセンブリ1よりも多少速いと予想できます。ピストンアセンブリ3は1または2よりも遅いと予想されます。ピストンアセンブリ4は体積弾性率βがかなり低い(空気の場合と同様)ため,ピストン4はピストン1よりも反応が遅いと予想されます。
結果

図 2:4つのシリンダーの例でのピストン位置
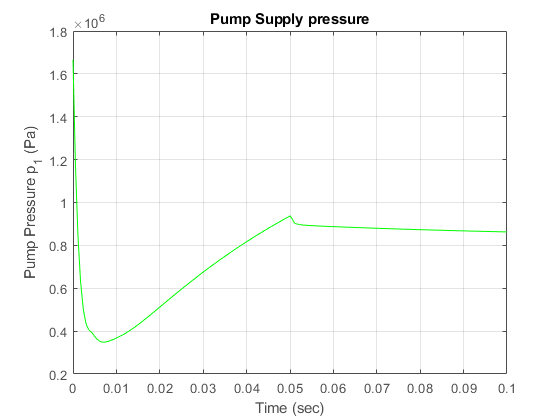
図 3:ポンプ供給圧p1
t = 0での最初の流入は4つのアクチュエータによって圧力のインパルスとして確認されます。ポンプ圧(p1)は最初こそ高いものの,4つのシリンダーからの流量需要が大きいため,急速に低下します。初期の過渡特性には(4毫秒頃),明らかに異なる応答によって各アセンブリユニットの個々の動的特性が識別されます。
パラメーター値で予測したとおり,アクチュエータ2はアクチュエータ1よりも速く反応します。これに比べて3番目と4番目のピストンは,同じ距離でより多くの作動流体を必要とするため,反応が大幅に遅れます。ケース3の場合,断面積が大きいため,ピストンが押しのける容積もより大きくなります。ケース4の場合,押しのけられる容積はケース1と同じですが,続けて圧縮されるため,より多くの流体を必要とします。
ポンプ圧がシリンダー内のレベルに下がると,動作の違いはわかりにくくなります。個々の応答がシステム全体の応答へと一体化され,コンポーネント間の流量バランスが保持されます。t = 0.05秒で,ポンプ流量は平衡に近いレベルまで減少し,アクチュエータの流量は,ほぼゼロになります。個々の定常ピストン位置は,設計から予測したとおり,同じです。
モデルを閉じる
モデルを閉じます。生成されたデータをクリアします。
你也可以从以下列表中选择一个网站:
