。
再利用可能なのインスタンス间でのデータストア共共
そのブロック,模型ブロックはををブロックブロックを缲り返しブロックブロックはを参照ブロックブロックにををカプセルカプセル々ししそのカプセルカプセル々ししをにカプセル后をししににカプセルしししにににをしししにににににしにににににににににににににににににににににににににししにににカプセル后しししににに后后后后しししにカプセル后后后后ししししし后后后后ししし各各后后ようしししに参照ブロックアルゴリズムのスタンドアロンインスタンスです。
既定では,各インスタンスで计算が実さ,モデルが含む信号の独コピーが格式さます。したがっ,インスタンスは相互し。ただし,データストア使使。ただし,データストアを使使。できます。
この例では,再利用可能制御アルゴリズムすべてのインスタンスインスタンスで障害を共で障害を设定できるためのインスタンスで障害をためのアクションで障害を解消ためアクションが。
モデル例の确认
モデル例sldemo_shared_data.を开启ます。

控制器サブシステムは,3つの模型ブロックブロックをじてコントローラーモデルsldemo_shared_data_alg.をを数回参照します。
アルゴリズムモデルを开启ます。

数据存储记忆ブロックFAULT_IND.は,障害指标を表します。ブロックブロック[信号属性],[モデルインスタンス间で别无する]がが选択されれている,sldemo_shared_data_alg.のすべてのインスタンスで指标が共されます。ブロックブロックsldemo_shared_data_alg.内に现正文,指标はモデルに対してローカル。sldemo_shared_data_alg.を参照する他のモデル,指标に対してに対して书できできん。
算法サブサブシステムPIDコントローラーを使使て,(sldemo_shared_data.のブロックで表される)アクチュエータの位置コマンドを生成します。
故障处理サブシステムは,障害指标をを设定,解消します。アルゴリズムのインスタンスで状态状态発するたびに状态状态発たびにが値をを超えるにストアののをシステムはデータストアの値をインクリメントインクリメントます。インスタンスで障害状态が解消れるたびに,サブシステムは値を1ずつ减らします。

モデル例のシミュレーション
亲モデルsldemo_shared_data.のシミュレーションを実行。
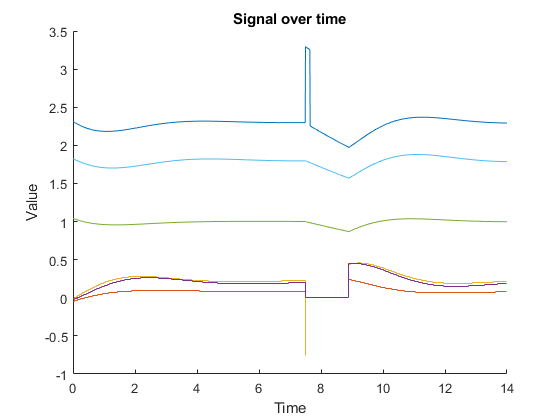
シミュレーションデータインスペクターを使をを,位置位置と制御ささ信号観察します.simulin金宝appkエディターのツールバー,强调表示されボタンををししますますます。
シミュレーションの途中で,制御されている信号剪辑では外乱がが生物します。
目前的情节举行

外乱は,制御アルゴリズムの対応するインスタンス障害によりトリガーます。このこの障害,3つの位置コマンド(VLV.通信方式)ははすべてゼロででロックれれれれれれ

后で,障害状态が解消さと,すべての位置コマンドと制御れて信号。
参考
关键词トピック
您还可以从以下列表中选择一个网站:
