主要内容
刚体形态树可视化
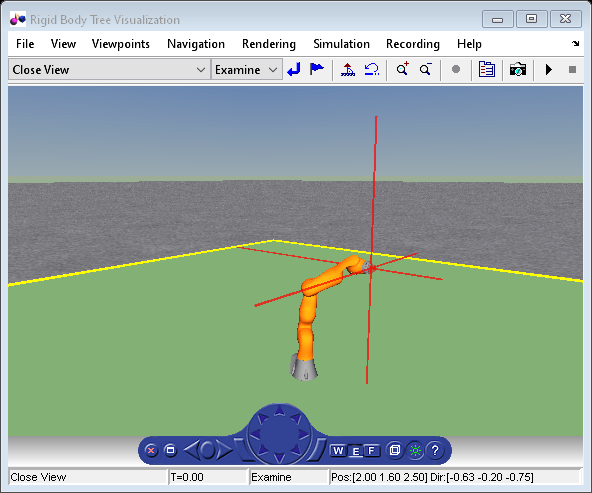
SL3Dex_RigidBodyTree示例演示了Simulink®3D动画™VR RigidBodyTree块的功能。金宝app
VR RigidBodyTree块在虚拟世界中插入机器人系统工具箱™刚性小组特对象的可视表示,并在虚拟现实查看器中显示它。在仿真期间,随后根据配置输入中定义的配置进行刚性车身树。
在此示例中,机器人配置由机器人系统工具箱反向运动块提供。您可以使用滑块更改机器人末端效应位置和大约一个轴的方向。
插入机器人后,可以使用Viewer另存为...菜单选项来保存虚拟世界。如果留下“始终使用刚性足体对象的机器人定义”复选框,请在后续模拟中,VR刚性摩托艇节块不会将机器人插入工作区中的刚性小组对象,而是使用先前保存在虚拟世界中的机器人实例文件。这允许进一步更改3D世界编辑器中的机器人视觉外观和功能(允许允许维护机器人结构和链路名称的任何更改 - 调整链接颜色,更改各个链路形状,添加冲突传感器等)。
VR刚性摩托艇节块功能假定3D图形属性在刚性小组中对象中定义。
此示例需要机器人系统工具箱。


您还可以从以下列表中选择一个网站: