ビデオ・Webセミナー
史蒂夫•米勒,MathWorks
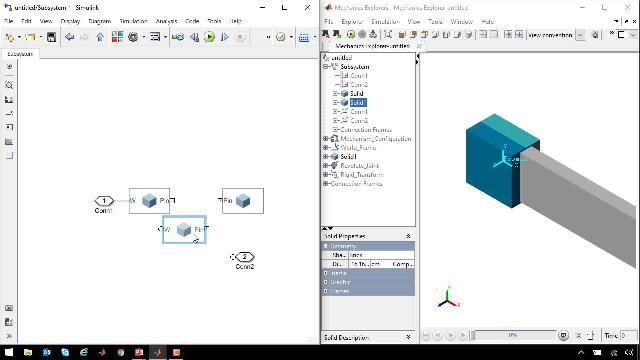
装配三维机械系统模型的工作流程涉及到用关节和约束连接模型中的部件。关节的选择是基于各部件相对于另一个部件的运动方式,这通常被称为它们的自由度。有时需要约束来限制连接自由度的运动。Simscape™Multibody™提供了约束条件,允许您建模系统,如啮合齿轮、过山车和带滑轮的电缆驱动机构。你可以通过指定力或指定运动的信号来指定关节是如何被驱动的。关节可以直接连接到电动、液压和其他物理领域的执行器模型。
加速模型预测控制器的3种方法
深度学习实用指南:从数据到部署
用MATLAB桥接无线通信设计与测试
深度学习与传统机器学习:选择正确的方法
电力电子控制设计中的硬件在环测试
基于MATLAB的预测维护
电动汽车建模与仿真-架构到部署:网络研讨会系列
你对能量转换控制了解多少?
反馈
特色产品
查看更多相关视频
选择网站
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系