
抓住船的克拉克的例证。
古代渔民长期以来担心海浪下面的东西。神话海怪话困扰着早期的水手。民间传说经常被告知巨大的生物,屠杀毫无戒心的船只。这些早期的水手很少知道,大量的海洋生物每晚都朝着表面上升,往往是在他们的船只下面喂养。
这种物质,即深散射层(DSL),是第二次世界大战时声纳操作员发现的。那块东西太大了,被误认为是海底。
海洋的深度散射层混淆了专家。在白天,它可以位于海洋表面下方500多米。晚上,它几乎会升到表面。但是,它是什么,为什么它定期移动?在发现后,这些问题已经困扰了科学家们几十年。
基于运动,科学家知道这一层是由生物体组成的。了解这些有机体会很大程度上增加了基础海洋学的基本知识和大海下的生活化妆。然而,挑战是如何研究经常在海洋的最深,最黑暗的区域中发现的东西。
早期对散射层的研究涉及到海洋学家设计的复杂渔网。首先,他们降低声音设备来研究混响并确定层的深度。接下来,他们试图将渔网放置在发现散射声的深度。当他们把网拉进来时,他们发现了一系列的生物,包括虾和灯笼鱼。
然后,在20世纪60年代期间使用载有纸下的潜水员来研究散射层,但这些工艺品只能在有限的时间内运行。所知的是,DSL由数百万海洋生物组成,例如在早期研究中捕获的生物发光灯笼。虽然个别生物很小,但长度最小4英寸,他们的纯粹数字创造了与船舶的声纳运营商的早期混淆。
DSL每天上升和跌落,因为该层中的生物在晚上游到营养丰富的表面层,然后在白天潜水到300到500米的深度,在那里存在较少的捕食者。这被称为Diel垂直迁移。
这种日常的深度穿越使得研究和理解这一层极其困难。对潜水员来说,每天潜水的最深部分太深了。光线无法到达这些深度,压力对人类来说是致命的,温度在0到5摄氏度之间徘徊。简而言之,早期的研究提供了对DSL的基本了解,但关于它的复杂性仍存在许多问题。
国家地理探索DSL
超过130年,国家地理协会投入了科学,探索,讲故事和教育,以进一步了解地球。
勘探技术团队是国家地理实验室,构建和部署突破性系统和硬件以加速探索。每年国家地理地带都会收集进入海洋的复杂性的新洞察力,包括深度散射层。不幸的是,随着早期探险家的意识到,调查海洋深度远未简单。
国家地理的团队决定创造一个机器人摄像机来研究DSL。他们的设计将基于现有的一款名为Dropcam的相机。Dropcam的设计是“称重和诱饵”,意思是在相机上绑上重物,并使用诱饵吸引海洋生物。当图像捕捉完成后,机器人摄像机放下重物漂浮到水面上。Dropcam对海洋最深处的居民成像非常棒,但它在研究DSL方面用处有限。
为了获得所需的洞察力,该团队需要设计一个能够与DSL一致在水柱中上下移动的摄像机。为了做到这一点,他们需要跟踪DSL的深度,然后根据垂直位置改变机器人的浮力。这将确保相机在执行每日迁移时在DSL中漂移。但是你如何远程改变机器人摄像机的浮力呢?
为了应对这个设计挑战,研究小组转向了公元前250年的一项发现:阿基米德原理。在他的作品中,在浮体,Syracuse的Archimedes表明,浸没在流体中的物体通过等于物体移位的流体重量的力来浮现。因此,为了改变浮力,团队需要改变机器人相机的音量。
该团队使用了一个浮力引擎,改变了新的机器人相机的音量,称为DriftCam。这种深度控制具有安静操作的额外优势,降低了附近鱼的噪音。
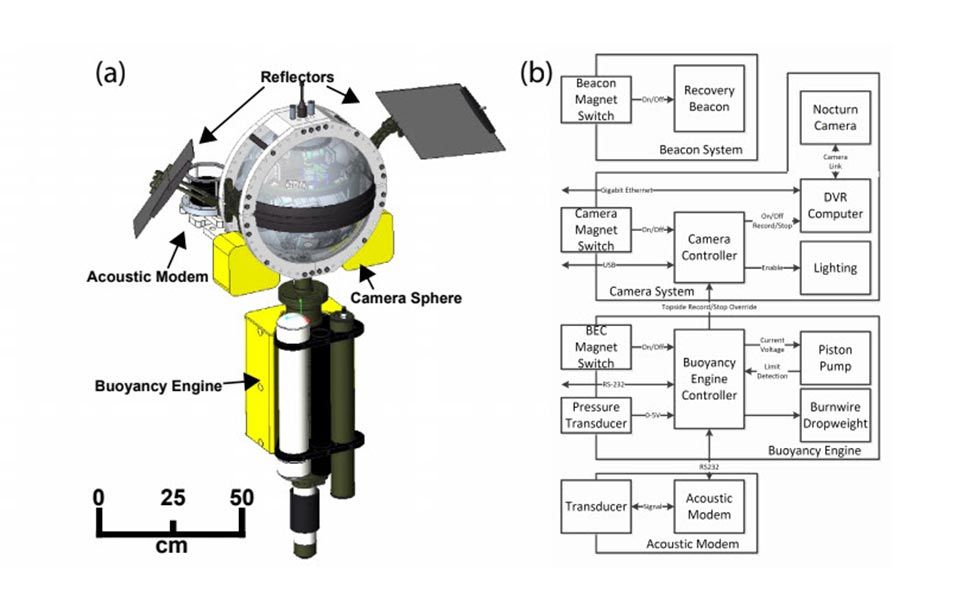
漂移相机的机械布局(左),相机的电气系统框图(右)。图片来源:Berkenpas等。专利申请中。
的Driftcam
早期的原型DriftCam在马里兰大学的中性浮力研究设施中的测试坦克中挣扎着控制问题。一个可能的解释被捕获了系统中的空气。
为了校正控制系统,研究小组根据浮力引擎的数据,使用理想气体定律来确定气泡的潜在大小。他们用了MATLAB®模拟并确定系统确实有气泡。在消除被困空气后,DriftCam正常运行。
Driftcam重量超过90kg(200磅),通过数字声学链路接收来自回声探测仪的信号来定位DSL。机器人下降到正确的深度,这样摄像机就可以在图层中对生物进行成像。采用200万ISO相机,Driftcam可以在非常低的光线下拍摄图像。这是至关重要的,因为生态系统生活在阳光几乎无法到达的深度,团队想要尽量减少人工光的使用。尽量减少人造光的使用有助于确保准确观察DSL中的生物,因为人造光可能会吓跑一些物种,同时吸引其他物种。
“Driftcam将图像保存为RAW tiff格式,”Berkenpas说。“所以,我们使用了MathWorks的计算机视觉和图像处理工具,将它们转换成可播放的视频。”
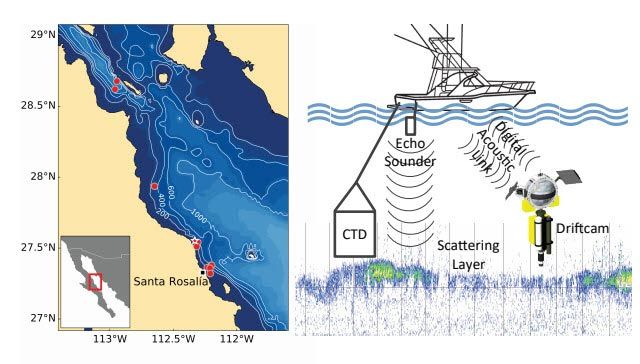
加利福尼亚州湾(左)的DriftCam部署的位置。echosounder用于定位DriftCam(右)。图像信用:Berkenpas等人。

漂移摄像机正在使用。图片来源:国家地理实验室的David McAloney
探索DSL的后续步骤
driftcamera已经在包括波多黎各和加利福尼亚湾在内的多个地点部署了30多次。他们表现得很好。但每次部署都需要一艘研究船和一个团队留在现场。
团队的下一个项目涉及更新DriftCams,以便它们可以部署在自动群中。目标是为单位互相交谈并将图层的位置视为优化问题。漂流区将彼此通信以定位和跟踪深度散射层。由于NOAA的资金,国家地理实验室与马里兰大学与马里兰大学合作。
创建一个合作摄像机的自主群将消除船舶部署的echoSounder和船员的需求,以便在现场停留,并帮助团队收集有关地球上最大的生态系统的更多信息。