电脑视觉工具箱
Diseñoyisimulaciónde sistemas de procesamientodevídeo,Visión人造YVisión3D

电脑视觉系统工具箱™Proporciona Algoritmos,Funciones Y应用程序Para ElDiseñoYLaRealizacióndePruebasde Sistemas de ProcesamientodeVídeo,Visión人工YVisión3D。ES Posible Llevar A Cabo LaDetecciónyElSeguimientode Objetos,AsíCogaLaetección,ExtracciónyCoincidenciadeCaracterísticas。en el caso de laVisión3d,La Toolbox Soporta LaCalibrióndeCámarasSimples,EstéreónEjode Pez,LaVisiónnEseréreo,LaReconstucción3D Y El Procesamiento de Nubes de Puntos Lidar Y 3D。LAS Apps DeVisión人工自动自动机制Los Flujos de Trabajo de Everiquetado deValidación(地面真理)Y deCalibracióndeCámaras。
存在La Posibilidad de entrenar探测器De Objetos PerserferizoS Mediante Algoritmos De Deep Learning Y Machine学习Como Yolo V2,更快R-CNN Y ACF。Para LaSegmentaciónSemántica,Se Pueden Usar Algoritmos De Deep Learning Como Segnet,U-Net Y Deeblab。Los Modelos PreviaMente Entrenados Permeren Setectar Caras,Peatones Y Otros Objetos Comunes。
Puede Acelerar Los Algoritmos Mediante SuEjecuciónCucesadoresMultinúcleoY GPU。LaMayoríadeLosAlgoritmos de Esta Toolbox Soportan LaWeneracióndeCódigoC/ C ++ Para SuOttentaciónConEl Protipado de Escritorio y El Desarrolo de Sistemas deVisiónembebidos。
旅行:

Detecciónyreconcimiento de Objetos
Marcos Para entrenar,Evaluar E Impeedar Devers de Objetos Como Yolo V2,更快的R-CNN,ACF Y Viola-Jones。Entre Las PovaceDades de Comprocimiento de ObjetosEstánOCRYBOLSAdePalabras Visuales。Los Modelos PreviaMente entrenados探测卡拉斯,涂层y otros objetos comunes。


Deteccióndeobjetosmediante更快的R-CNN。
SegmentaciónSemántica
Semmenteimágenesyvorúmenes3d mediante laclasificacióndepíxelesyvóxelesysymianteredes como segnet,fcn,u-net y deeplab v3 +。

Etiriquetado deValidación(地面真理)
汽车eLtiquetado paradeteccióndeobjetos,seconiónsemánticayclasificacióndeacenasmediante las应用程序视频饰品贴图
 con la app Video Labeler.")
Etiquetado deValidación(地面真理)CON LA APP视频贴图。
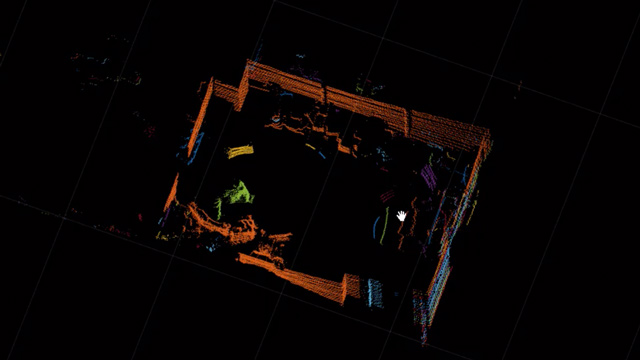
E / S de Nubes de Puntos Y Lidar
Lea,Escriba Y Visualice Nubes de Puntos A Partar de Archivos,Lidar Y Sensores RGB-D。
Regantme Nubes de Puntos
Registre Nubes de Puntos 3D Mediante Los Algoritmos NDT(Transformada De Deveryes),ICP(PuntoMásCercanoIterativo)Y Cpd(Movimiento de Puntos Cherente)。

Registro Y Stitching de Una Serie de Nubes de Puntos。
segmentaciónyajuste de formas
细分Nubes de Puntos en Clusters Y Ajuste Las FormasGeométricas是一个Nubes de Puntos。Segmente El Plano de Tierra de Los Datos de Lidar Para Aplicaciones deConducciónAutónomayRobótica。

Segmentacióndenuanube de puntos lidar。
CalibracióndeNoaCámara简单
自动裁判机组DE AJEDREZ Y Caliber LasCámarasestenopeicas y ojo de pez Mediante la app相机校准器。
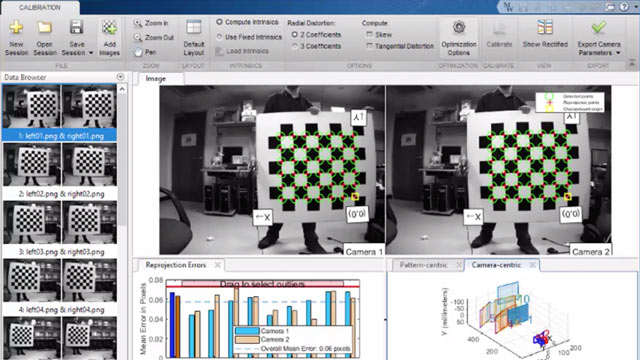
CalibracióndeCámarasEstéreo
Caliber联合国PardeCámarasEstéreo帕拉格计算La Profundidady y Recomstruir Escenas 3D。

应用立体声相机校准器。
Visión3D
oldenga la estructura a partir del movimiento y laOdometría视觉。

estructura multivista a partil del movimiento。
VisiónneStéreo.
计算La Profundidad Y Recomstruya Una Escena 3D Mediante联合国PardeCámarasEstéreo。

Mapa de DivearidadEstéreoque代表LAS Profundidades Relativas。
Detección,Extracciónycecindenciadecaracterísticas
检测,Extraiga y Haga CoincidircaracterísticasdeInterésComoBlob,Bordes Y Esquinas en DiversasImágenes。

Deteccióndeunobetoen en una escena desordenada atravésde ladetección,Extraviónycecindenciadecaracterísticasmediante puntos。
RegistrodeMágenesAbadoenCaracterísticas
HAGA COINCIDIR CARARTYSTICAS en VARAIASIMÁGENESPARA GRACACL LAS变换ACIONESGEOMétricasTEMÁGENESy注册商Secuencias deimágenes。

Panorama CreaDo Mediante El Registro Basado enCaracterísticas。
Seguimiento de Objetos
Realico Un Seguimiento de Las Trayectorias de Los Objetos de Un Cuadro A Otro en SecuenciasdeVídeo。

Las Estelas indican las trayectorias de los objetos seguidos。
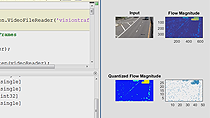
Cálculodel Movimiento.
计算el movimiento entre distinos cuadrosdevídeomedianteflujoóptico,巧合菊属de bloques y coincidencia de plantillas。

Deteccióndeobjetosen Movimiento Con UnaCámaraFija。
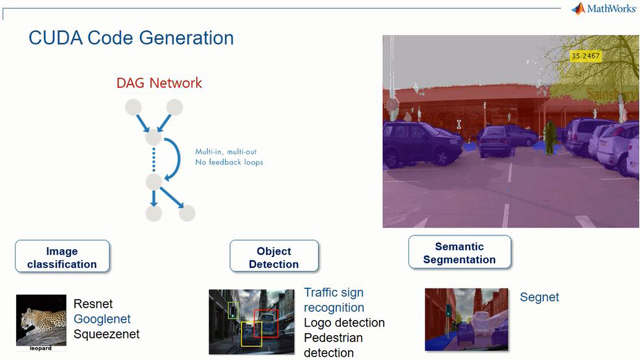
WeneracióndeCódigo
Genere C / C ++,CódigoCUDA Y FUECIONES MEX PARA FUECIONES,CLACE,SYSTEM OFOCONET Y BLOQUES DE TOOLBOX。
视频贴图仪E图像贴标程序
Posibilidad de Copiar Y Pegar Etriquetas dePíxeles;Panorámicay zoom mejorados;NavegaciónPorCuadros Mejorada;Roi delíneas,Atributos de Etiquetas YAdicióndeFiquitiquetasA图像贴标程序。
Aumento de Datos para detectores de Objetos
TransformAcióndeMágenesyuadros delimitadores。
SegmentaciónSemántica
Clasificacióndepíxeles个体enimágenesyvorúmenes3d mediante deebplab v3 + y redes 3d U-net。
Deteccióndeobjetospara深入学习
entrenamiento de r-cnn de extremoo a极值másrápido,estimióndeuadrosde Anclaje Y Uso de Datos De Imagen MultiCalal。
Aceleraciónde深度学习
Optimizacióndeyolov2 ysegingaciónsemánticamedianteaceleraciónmex。
咨询Las.Notas de laVersiónPara Obener Detalles Sobre estascaracterísticasy las funciones eadenderes。
