ROS工具箱
从根本上说,这是一种模拟和绝望
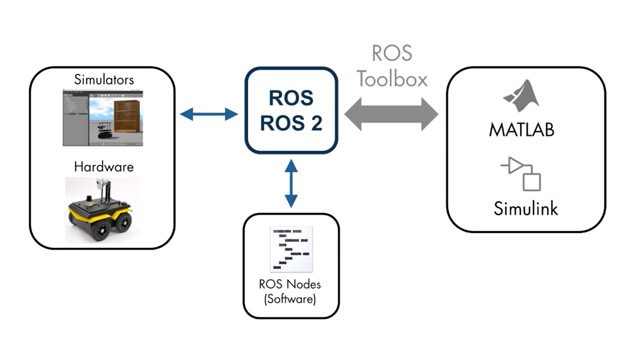
国际交流网络®y仿金宝app真软件®con机器人操作系统(ROS y ROS 2),允许使用红色nodos ROS。工具箱包括MATLAB函数和模拟输入、分析和复制数据。他说:“我们的国家是一个红色的国家,真正的国家是一个合法的国家。”。金宝app
这个工具箱允许在través de La simulación de escritorio和mediante La conexión外部的机器人模拟器上进行验证。ROS Toolbox soporta la generación de código c++ (conMATLAB编码器™y金宝appSimulink编码器™),我们可以使用automáticamente作为Simulink模型的一部分,así como在硬件上使用físico作为Simulink。金宝app在Simulink的外部环境中,我们可以通过parámetro金宝apps和其他硬件来建立模型。
Mas给:
Conexión一个红色的ROS
这是一个很好的解释。在有争议的情况下,登记册的使用情况。我们可以看到我们的社会结构。

Conexión一个红色的ROS。
Configuración de una red ROS
我们确定在不同的配置中含有红色ROS或ROS 2。配置diversos nodos ROS para distribuir tareas e información。

红色ROS 2 de ejemplo。
编辑y suscriptores
Envíe y reciba mensajes or ROS 2 mediantema con semántica de edición-suscripción。

Simulink模型金宝app:suscripción,传感器数据,publicación,鲁达速度。
Servicios y accion
利用我们的客户服务关系,实现我们的客户服务关系。

Interacción client -servidor mediante servicios y acciones ROS。
巴黎地铁车站
使用parámetros ROS para almacenar las opciones de configuración de varios nodos y许可la reconfiguración dinámica de los nodos。

在Simulink模金宝app型下,我们可以在parámetros ROS上建立咨询,并在selección上建立查询,在vehículo上建立查询。
注册档案馆(罗斯巴格)
导入archivos rosbag过滤器,可视化和分析数据。

Flujo de trabajo para la selección de datos ROS desde archivos rosbag。
Mensajes integrados
利用可再生能源与可再生能源的相容性。

Ejemplo de mensajes ROS兼容。
Mensajes personalizados
我们希望能有更多的人使用活性氧或活性氧2,希望能有个性化的人使用。

2.2.2.2.2.2.2.2。
Generacion de nodo
Gunel-Cig-Digo C++对偶ApICICACIONS不需要使用FunsioalIDAD ROS O ROS 2。

从Simulink生成独立的ROS 2节点。探索画廊(6张图片)金宝app

在Simulink中金宝app,控制器和机器人可以在ROS的模拟器中弹出。
