建立卡尔曼滤波融合加速度计、陀螺仪和GPS -要有正确的参数
67(30天)
显示旧的评论
亲爱的Matlab社区,
我相当新的Matlab(只用于大学很久以前)。
我收集传感器数据(加速度计、陀螺仪和GPS)智能手机和想执行一个传感器融合显示路径3 d比刚刚更详细的策划GPS数据。
我已经设法建立基于Matlab的代码例子。但是我真的在获得初始参数(加速度偏见,陀螺偏见,状态协方差矩阵…)和传感器噪声。
有人能给我一些提示,如何获得这些参数的正确值从我收集传感器数据吗?
这是我的设置初始化:
%初始化fusionfilter并设置初始状态
filt = insfilter (“AsyncIMU”);
filt。IMUSampleRate = imuFs;
refloc = [SurfGPS (2:4)];
filt。ReferenceLocation = refloc;
% filt。VelocityNoise = (0.05 0.05 0.05);
% filt。AccelerationNoise = (0.05 0.05 0.05);
% filt。GyroscopeBiasNoise = [1 e-12 1 e-12 1 e-12];
% filt。AccelerometerBiasNoise = [1 e-12 1 e-12 1 e-12];
initstate = 1(28日1);
initstate (1:4) = (0.7071 0 0 0.7071);
initstate (7) = SurfGyro (2:4);
initstate (8) = SurfGPS(九11);
initstate (11:13) = SurfGPS (1, 12:14);
initstate(十四16)= [0 0 0];
initstate(十七19)= (0.012 0.012 0.012);
initstate (20:22) = (0.012 0.012 0.012);
initstate (23:25) = [0 0 0];
% %
filt。状态= initstate;
我这里有噪音值预测:
%设置传感器噪声
Rmag = 80;
Rvel = 0.64;
Racc = 800;
Rgyro = 1的军医;
rpo = 5;
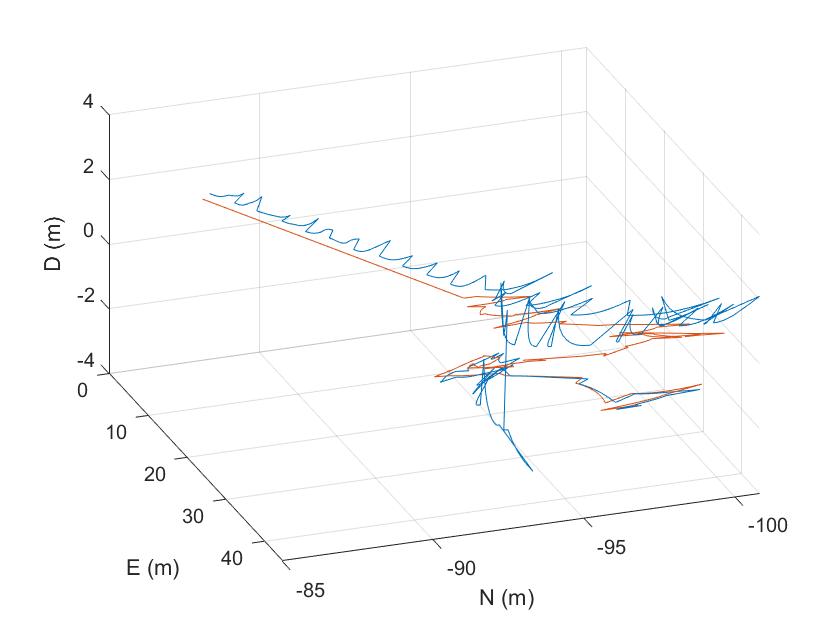
这是我目前的结果(蓝线:融合的传感器;红线:AsyncIMU只有GPS数据融合):
我会非常感激的技巧和如何设置我的系统上的指针。