
嗨Yunsik,
联系信息和我创建了仿金宝app真软件模型能够订阅联系消息数据。启用这个,我做了以下更改。
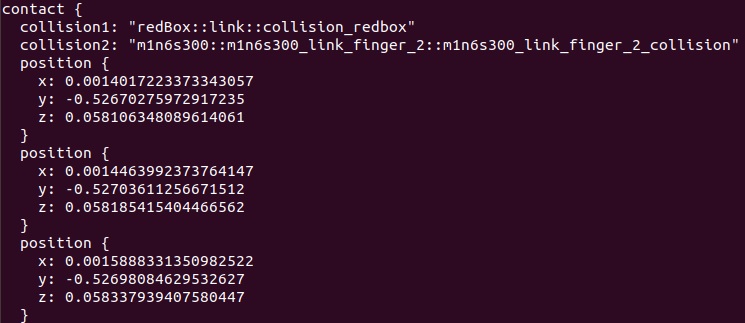
1]联系人信息是repeatative所以你必须改变一些信息如下。
你应该改变尺寸按照你消息长度。还有,别忘了DimesnionMode改为“变量”(以红色突出显示)。联系人信息不断改变它的大小应变量。确保,你所有后更改。
联系

JointWrench

时间

Vector3d

2)仿真软件模金宝app型如下,


基本上,你得到数组形式的值。例如如果接触消息包含14联系消息/细节,哪些你认为重复字段在protobuf但在仿真软件,这些消息以数组形式如上所示。金宝app
在上面图中,< x >包含Wrench.force。x以数组形式,每个索引定义的力量。为每个身体x值。
你可以单独的这些值在MATLAB函数。
谢谢。



