这些文件允许模拟一个微分带领(unicycle-like)移动机器人考虑其完整的动态模型。这里的动态模型采用基于速度(不是力矩),这使得它更容易与现有的移动机器人集成控制器生成参考线速度和角速度。
虽然不是必需的,兼容的街区建造了彼得·柯克的机器人工具箱,工具箱的用户可以使用的功能。
集的动态参数可用于以下机器人:
——先锋dx生病的激光传感器;
——先锋dx没有激光传感器;
-先锋2没有车载电脑(没有激光传感器);
-先锋2与车载电脑(没有激光传感器);
——机器人轮椅载着一个55公斤的人;
——机器人轮椅携带一个125公斤的人;
——Khepera III (LAUT, 2011);
——RobuLAB-10 (SHOJAEI et al ., 2011)。
这些文件包括两个库:
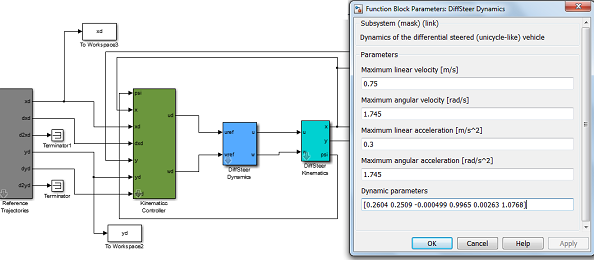
——“DiffSteer_model。基金”:包含了差动式驱动移动机器人的运动学和动力学块。
——“控制器。基金”:包含以下模块:
1)运动轨迹跟踪控制器;
b)动态补偿控制器1;
c)动态补偿控制器2;
d)动态参数估计量(自适应控制器);
e)轨迹发生器;
f)性能计算器(IAE ITAE,伊势,ITSE和能源索引)。
提供了四个金宝app模型系统为例:
1。“kinematic_controller_system。基金”:实现一个简单的轨迹跟踪控制器使用机器人的运动学和动力学块。
2。“dynamic_controller_system。基金”:实现一个更复杂的系统,包括一个自适应动态补偿控制器和轨迹跟踪控制器和嘈杂的传感器测量。
注意:在运行“kinematic_controller_system。基金”或“dynamic_controller_system。基金”模拟可以检查结果运行包括脚本“plot_results.m”。
3所示。“sl_lanechange_unicycle。基金”:实现相同的系统作为机器人工具箱”sl_lanechange”,但使用微分控制移动机器人的运动学模型。
4所示。“sl_lanechange_unicycle_dynamics。基金”:实现相同的系统作为机器人工具箱”sl_lanechange”,但使用运动学和微分控制移动机器人的动态模型。
同时,以下提供的脚本:
1。“sim_kin_controller。m:使用“kinematic_controller_system。基金”系统来模拟运动轨迹跟踪控制器作用于移动机器人(完整的模型)。
2。“sim_dyn_controller。m:使用“dynamic_controller_system。基金”系统来模拟一个自适应动态补偿控制器操作与轨迹跟踪控制器作用于移动机器人(完整的模型)。
3所示。“plot_results。m”和“plot_results_kin。m:现在模拟的结果。
R2013a,所有的块都进行MATLAB R2012b R2014b, R2016a和2017年,所有窗户。
享受吧!
如果你使用这个工具箱,请引用以下文章:
马丁斯,f . N。,m和Carelli Sarcinelli-Filho R。
velocity的动态模型及其属性差动驱动移动机器人。
智能与机器人系统学报,2016。
http://rdcu.be/npvw
@article {martins2017velocity,
title = {velocity的动态模型及其属性差动驱动移动机器人},
作者={马丁斯费利佩•N和Sarcinelli-Filho M{\ '}力拓和Carelli,里卡多},
杂志={智能\ &机器人系统杂志},
体积= {85},
数量= {2},
页面= {277 - 292},
年= {2017},
出版商= {Springer}
}
作者:费利佩Nascimento马丁斯
https://about.me/felipe.n.martins
基于之前的工作由菲利普Nascimento马丁斯和25卡多佐天蓝色
佛罗里达大学——圣埃斯皮里图联邦大学的巴西
2006 - 2008
有关更多信息,请参考:
马丁斯,f . N。天蓝色,w . C。Carelli, R。Sarcinelli-Filho, m
Bastos-Filho t . f .自主移动机器人的动态自适应控制器
轨迹跟踪。控制工程实践、诉16 p。1354 - 1363年,2008年。
http://www.sciencedirect.com/science/article/pii/S0967066108000373
马丁斯,f . n . Modelagem e Compensacao da Dinamica de无袖长衫Moveis e安和苏阿
Aplicacao em Controle de Formacao。Tese de Doutorado em Engenharia总局- Automacao。
圣埃斯皮里图联邦大学做,2009。
LAUT,杰弗里。迁移控制策略的动态参数识别方法
在异构的轮式移动机器人。moran的侮辱。伍斯特理工学院,2011。
https://www.semanticscholar.org/paper/A-Dynamic-Parameter-Identification-Method-for-Migr-Laut/000b0647483dad86a7cb6c51c25cff0e3219b633
SHOJAEI Khoshnam et al。自适应轨迹跟踪控制差动驱动的轮式移动机器人。n。03 Robotica, v . 29日,页。391 - 402年,2011年。
引用作为
费利佩•马丁斯(2023)。velocity的动态模型和微分控制移动机器人自适应控制器(//www.tatmou.com/matlabcentral/fileexchange/44850-velocity-based-dynamic-model-and-adaptive-controller-for-differential-steered-mobile-robot), MATLAB中央文件交换。检索。
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.42 | 参考包含在描述。 |
|
|
| 1.41.0.0 | 工具箱只更新描述。 |
||
| 1.4.0.0 | ——包括动态参数RobuLAB-10 (SHOJAEI et al ., 2011); |
||
| 1.3.0.0 | 作为一个工具箱(内容。Mathworks mltbx文件)自动创建的网站。我没有测试,因为我还没有访问MATLAB 2014 b。 |
||
| 1.2.0.0 | 包括Khepera三世移动机器人的动态参数(由Jeffrey Laut标识)。 |
||
| 1.1.0.0 | 小read_me修正。txt文件。 |
||
| 1.0.0.0 |