这些文件为这本书第9章“实用模型预测控制的设计与应用”由爱思唯尔(电子书ISBN: 9780128139196,平装ISBN: 9780128139189)。
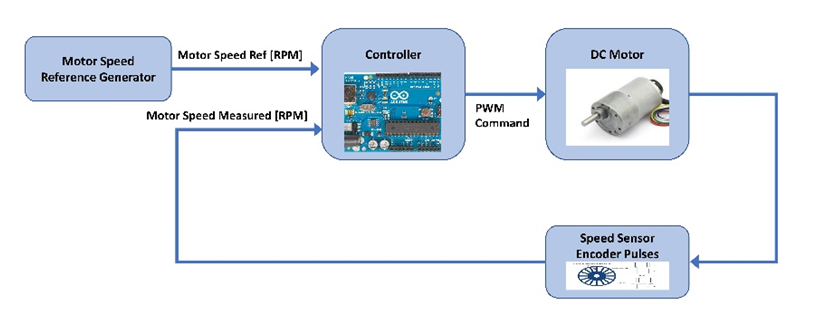
这一章的过程指导用户通过使用MPC控制直流电机的速度和运行实时硬件控制器。
为系统识别收集数据,Chapter_9_Section_6_Model运行。基金,然后Chapter_9_Section_6_Script。米图结果。假设用户Arduino超级连接每chapter_9指令。
Chapter_9_Section_7_Script运行。评估电机的非线性。在这一步中,直流电机的数据已经嵌入到脚本中。用你的脚本中收集的数据,而不是一个。
Chapter_9_Section_8_Script运行。执行系统识别。
在文件夹Section_9,您将发现直流电机的三线性模型。您可以使用这些来创建MPC控制器。
货币政策委员会会议MPC_DesignTask_Chapter_9_Section_9_MPC_1下保存。垫,MPC_DesignTask_Chapter_9_Section_9_MPC_2。垫子和MPC_DesignTask_Chapter_9_Section_9_MPC_3.mat
导出的MPC控制器Motor_Linear_MPC_Mode_1下保存。垫,Motor_Linear_MPC_Mode_2。垫子和Motor_Linear_MPC_Mode_3.mat
运行多模Arduino MPC控制器,去Chapter_9 / Section_10文件夹和遵循这些指令:
确保电机硬件和Arduino大型董事会以开放的会话连接到计算机的Matlab®(最好是R2017a)。将Matlab®目录Chapter_9 / Section_10目录。在Matlab®命令窗口加载MPC控制器通过键入命令加载Motor_Linear_MPC_Mode_1.mat .mat文件;加载Motor_Linear_MPC_Mode_2.mat;负载Mo-tor_Linear_MPC_Mode_3.mat。打开模型C金宝apphapter_9_Section_10_Model_1.slx®模型。然后单击运行按钮从模型生成代码,编译和部署到Arduino兆。
引用作为
纳西姆•哈立德(2023)。MPC的实时嵌入式目标应用程序(//www.tatmou.com/matlabcentral/fileexchange/67401-real-time-embedded-target-application-of-mpc), MATLAB中央文件交换。检索。
Chapter_9 / Section_6
Chapter_9 / Section_6 / Chapter_9_Section_6_Model_ert_rtw
Chapter_9 / Section_7
Chapter_9 / Section_8
Chapter_9 / Section_10
Chapter_9 / Section_6
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0.0.1 | 更新项目的网站。 |
|
|
| 1.0.0.0 | 我们增加了一个标签:Arduino。 |
|