第六章
这些文件为这本书第六章“实用模型预测控制的设计与应用”由爱思唯尔(电子书ISBN: 9780128139196,平装ISBN: 9780128139189)。
在许多工业应用中,植物是非线性的动态。经常被问的问题是高度非线性的吗?我们可以使用线性控制器技术如PID吗?在本章将研究非线性控制器的设计。响应面整个范围的操作将生成的工厂。这个表面会给洞察控制器所需的全部的数量。多个MPC然后设计和转换逻辑的概念介绍和调优的挑战MPC控制器的切换。
Chapter_6 \ Section_3文件夹中,20个模拟船舶通过使用并行计算工具箱进行。阅读和Chapter_6_Section_3_Script运行。m进行模拟。方法,如改变模型®脚本参数,创建新文件名称,并检查金宝appMatlab®许可证包含在脚本中。
Chapter_6 \ Section_4文件夹中,响应面分析和非线性进行了评估。Chapter_6_Section_4_Script运行。米运行和策划分析。
在Chapter_6 \ Section_5文件夹,Chapter_6_Section_5_1_Script运行。米来模拟不同的螺旋桨和舵角的船。一旦完成,Chapter_6_Section_5_2_Script运行。米来生成一组线性模型船的各种螺旋桨和舵角。
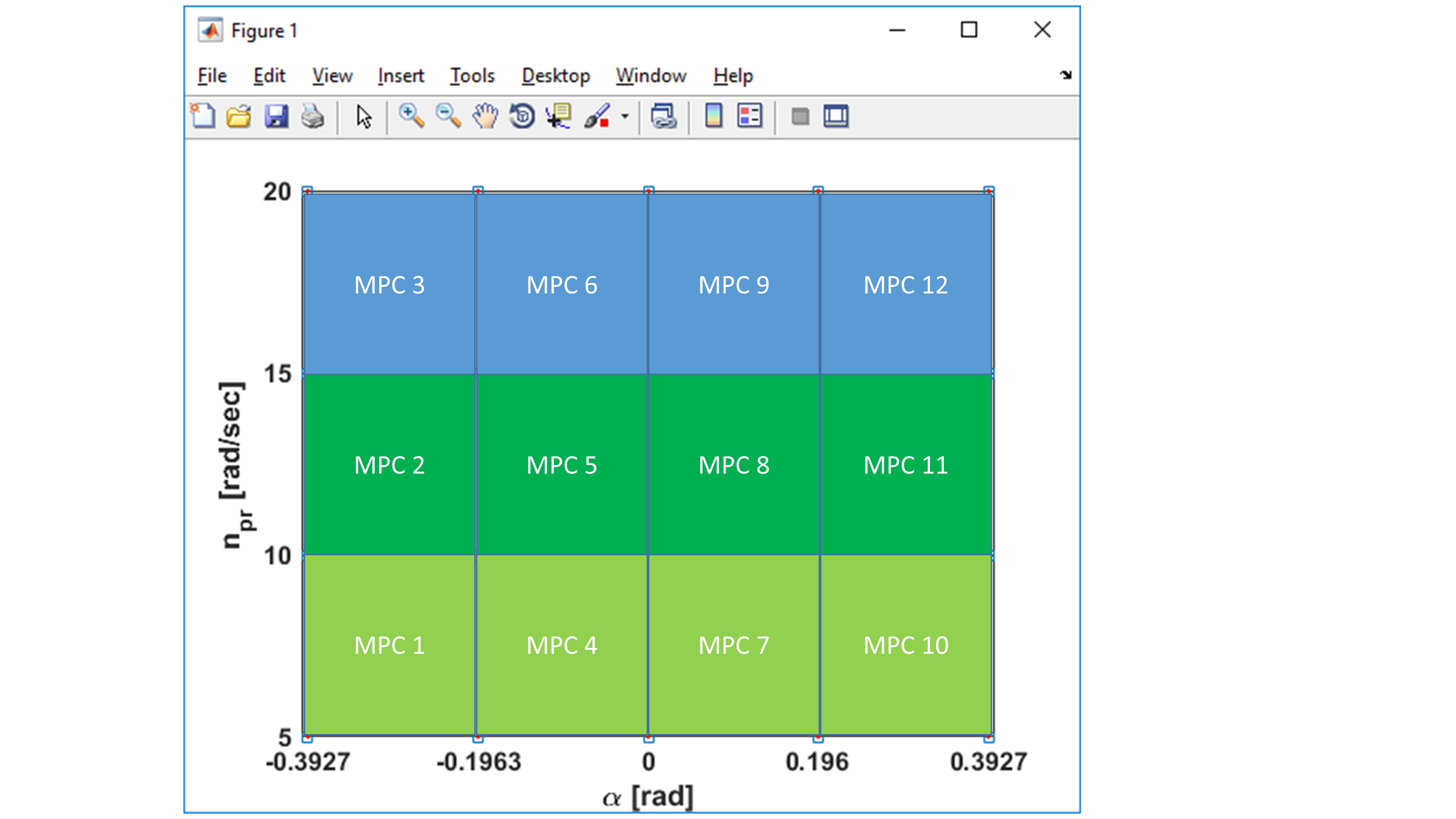
在Chapter_6 \ Section_6 Chapter_6_Section_6_Script运行。m生成所有MPC控制器的各种螺旋桨和舵角以前Chapter_6 \ Section_5文件夹中生成的。
Chapter_6 \ Section_7包含仿真软件模型,Cha金宝apppter_5_Section_8_Model_and_Controller。基金的船模型与多个MPC控制器和切换逻辑。
在Chapter_6 \ Section_8船的模型和控制器,Chapter_6_Section_7_Model。基金,是使用Chapter_6_Section_8_Script_1模拟。m。跟踪结果和控制器的性能进行了分析。频繁切换的问题MPC模式识别。介绍了磁滞块来缓解这个问题。同样,Chapter_6_Section_8_Script_2。m是用来模拟新切换逻辑,Chapter_6_Section_8_Model.slx。
应用程序在Chapter_6 \ Section_9问题类似于前一节中介绍。运行
Chapter_6_Section_9_Solution_Script.mto simulate and see tracking performance of the controller and switching logic performance.
引用作为
纳西姆•哈立德(2023)。多个MPC设计一艘船(//www.tatmou.com/matlabcentral/fileexchange/67852-multiple-mpc-design-for-a-ship), MATLAB中央文件交换。检索。
Chapter_6 Section_3 /
Chapter_6 Section_4 /
Chapter_6 Section_5 /
Chapter_6 Section_6 /
Chapter_6 Section_8 /
Chapter_6 Section_9 /
Chapter_6 Section_3 /
Chapter_6 Section_5 /
Chapter_6 Section_7 /
Chapter_6 Section_8 /
Chapter_6 Section_9 /
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0 | 添加的图标图片。 |
|