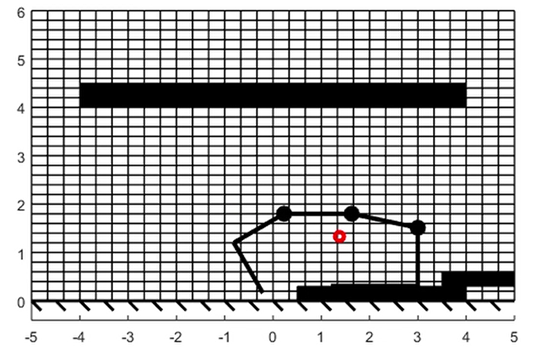
4 Link机器人模拟器
一个四连杆机器人的MATLAB模拟器,教授机器人的基本原理
四连杆机器人运动模拟器,演示:
-机器人行走的硬编码。
-逆运动学控制。
-通过Arduino与物理机器人交互的卡尔曼滤波
Q-Learning,从一个位置移动到另一个位置,同时保持稳定并避免障碍。
-模拟退火,从一个位置移动到另一个位置,同时保持稳定并避开障碍物。
-模拟退火向前行走,避免遇到障碍物。
引用作为
大卫·哈德曼(2023年)。4 Link机器人模拟器GitHub (https://github.com/DSHardman/4linksimulator)。检索.
无法下载使用GitHub默认分支的版本
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0.0 |
|
要查看或报告此GitHub插件中的问题,请访问GitHub库.
要查看或报告此GitHub插件中的问题,请访问GitHub库.
您也可以从以下列表中选择一个网站: