通信延迟对ABS控制系统的影响
概述的例子
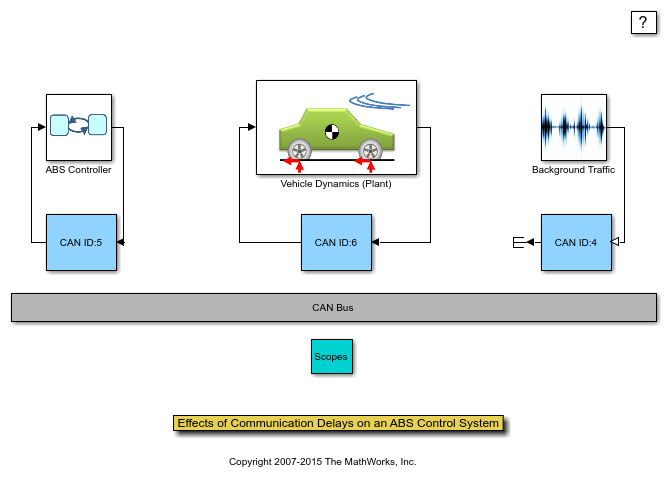
这个例子展示了在使用控制区域网络(CAN)通信的防抱死制动系统(ABS)中,随机网络流量如何导致时间延迟和不确定性。该模型代表了一个真实的高负载网络,并说明了一个分布式系统的领域特定模型。通过在模型中包含真实世界的计时效果,在在硬件中测试设计之前,您可以对设计的行为和健壮性有信心。
没有交通
我们从防抱死制动系统的理想场景开始,该系统使用CAN通信,没有后台流量。在这个模型中,在运行仿真之前,我们通过手动设置后台流量子系统块中包含的手动开关的输出到“OFF”位置来模拟没有后台流量的CAN。在这种理想的场景中,该软件模拟的通信系统随时间的推移具有稳定的网络利用率,并且消息传递没有延迟。这些理想的条件导致优异的滑移响应从ABS系统相对于降低车轮速度。


与交通
接下来,我们模拟了具有随机网络流量的CAN的更真实的场景。这种后台流量会导致网络上的消息传递延迟。为了模拟这一点,我们手动将后台流量子系统块中包含的手动开关设置为“ON”位置。通过将Manual Switch设置为这个位置,我们允许步进功能块(也包含在后台流量子系统块中)向网络引入流量。在这个模型中,Step Function块被配置为在仿真时间T=6秒时输出一个值。如果我们将更新后的仿真结果与之前的理想场景进行对比,我们可以看到,引入消息传递延迟会导致ABS系统相对于车轮速度的滑移响应更差。


重新确定CAN消息的优先级
CAN网络根据每个节点的消息优先级处理来自网络上分布式节点的消息。在我们的模型中,我们定义了ABS控制器子系统的消息优先级为5,车辆动力学子系统的消息优先级为6,背景交通子系统的消息优先级为4。这意味着CAN网络首先处理来自后台流量子系统的消息。我们前面看到,在网络上引入后台流量导致ABS系统的滑移响应差得多。为了减少后台流量的负面影响,我们调整了ABS控制器子系统和车辆动力学子系统的CAN报文优先级,使其优先级高于后台流量子系统。这一改变减少了网络上的消息传递延迟,并改善了ABS系统相对于车轮速度的滑移响应。


结论
这个例子展示了一个使用CAN通信的防抱死制动系统,并强调了网络利用率增加对延迟和响应时间的负面影响。
另请参阅
实体发电机|实体服务器|队列|资源池|资源收购方|资源发布人
相关的话题
你也可以从以下列表中选择一个网站: