激光雷达的工具箱
Design, analyze, and test lidar processing systems

LIDAR Toolbox™提供用于设计,分析和测试LIDAR处理系统的算法,功能和应用。您可以执行对象检测和跟踪,语义分割,形状配件,激光雷达登记和障碍物检测。LIDAR Toolbox支金宝app持Lidar-Camera Cross校准,用于组合计算机视觉和LIDAR加工的工作流程。
您可以使用深度学习和机器学习算法培训定制检测和语义分割模型,例如PoinseG,Pointpillars和SqueezeSegv2。LIDAR Labeler App支持Lid金宝appar Point云的手动和半自动标记,用于培训深度学习和机器学习模型。该工具箱可让您从Velodyne流中流®lidars and read data recorded by Velodyne and IBEO lidar sensors.
LIDAR工具箱提供了参考示例,说明了LIDAR处理对感知和导航工作流的使用。大多数工具箱算法支持C / C ++代码生成,用金宝app于与现有代码,桌面原型设计和部署集成。
Get Started:
Lidar Semantic Segmentation
在LIDAR数据上列车,评估和部署语义分段网络,包括POINSEG和SCHEEZESEGV2。

Semantic segmentation using SqueezeSegV2.
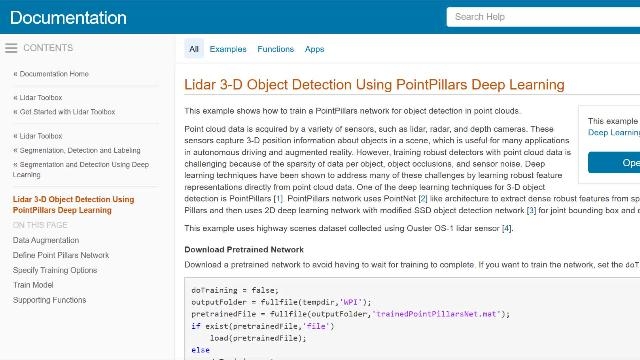
Object Detection on Lidar Point Clouds
在LIDAR点云中的物体周围检测和适合定向边界框。设计,列车和评估强大的探测器,如Pointpillars网络。
Lidar Labeling
Apply built-in or custom algorithms to automate lidar point cloud labeling with the Lidar Labeler App, and evaluate automation algorithm performance.

Lidar Labeler App.
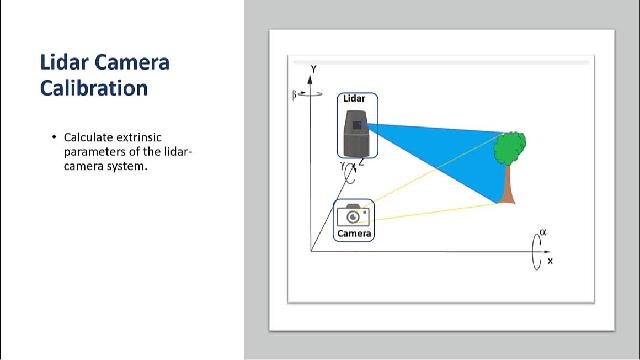
激光器和相机校准
Estimate the rigid transformation matrix between a lidar and a camera using the checkerboard calibration method.
Lidar-Camera Integration
Fuse lidar and camera data to project lidar points on images, fuse color information in lidar point clouds, and estimate 3D bounding boxes in lidar using 2D bounding boxes from a co-located camera.

Bounding box transformation from image to lidar point clouds.
Lidar Processing Algorithms
应用函数和算法进行下采样,中值滤波,正常估计,转换点云,提取点云特征。

估计LIDAR点云的法线。
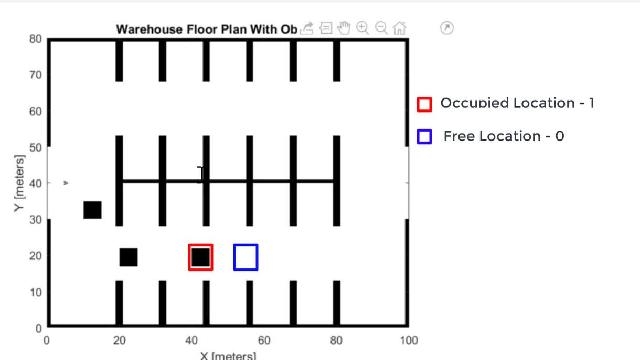
2D LIDAR Slam.
Implement Simultaneous Localization and Mapping (SLAM) algorithms from 2D lidar scans. Estimate positions and create binary or probabilistic occupancy grids using real or simulated sensor readings.
Velodyne LiDar传感器采集
Acquire live lidar point clouds from Velodyne Lidar sensors, visualize them in MATLAB, and develop lidar sensing applications.

Getting started with lidar acquisition in MATLAB.
阅读和写入LIDAR点云数据
Read lidar data in different file formats, including PCAP, LAS, ibeo, PCD, and PLY. Write lidar data to PLY and PCD files.

Reading lidar point cloud data in LAS format.
LIDAR点云的功能提取
从LIDAR点云提取快速点特征直方图(FPFH)描述符。

Extracting and matching features from lidar point clouds.
LIDAR点云注册
Implement 3D SLAM algorithms by stitching together lidar point cloud sequences from ground and aerial lidar data.

Map building from a lidar point cloud sequence.
