{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
准确的设备模型是基于模型设计的控制系统开发的关键。有了一个构造良好的工厂模型,工程师可以验证控制系统的功能,进行闭环模型在环测试,通过模拟调整增益,优化设计,并运行在实际工厂上难以或有风险的假设分析。
尽管有这些优势,工程师有时不愿意投入所需的时间和资源来创建和验证工厂模型。关注点包括运行模拟需要多少时间,构建和验证模型需要多少领域和工具知识,以及需要什么类型的设备来获取构建和验证模型所需的硬件测试数据。
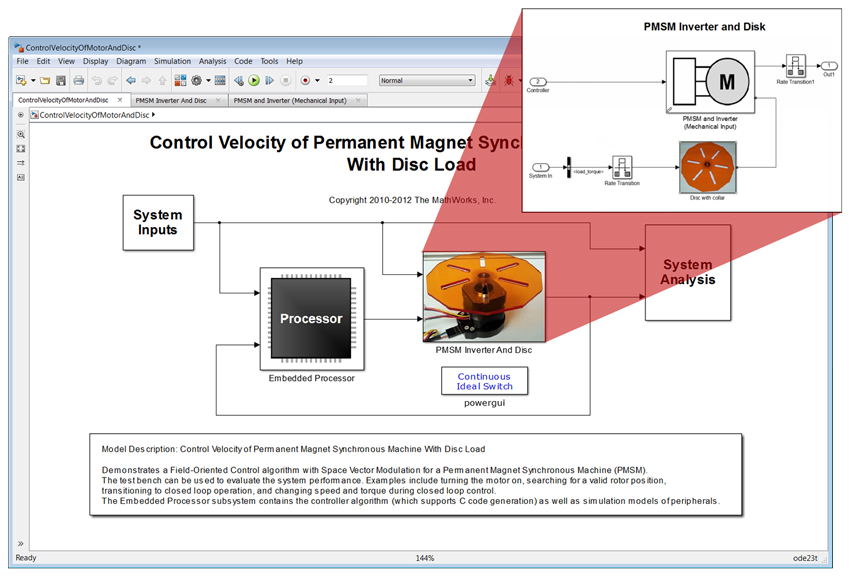
本文描述了使用MATLAB创建永磁同步电机(PMSM)工厂模型的工作流程®和仿真软金宝app件®以及常用的实验室设备。工作流程包括三个步骤:
- 执行测试
- 从测试数据中识别模型参数
- 通过仿真验证参数
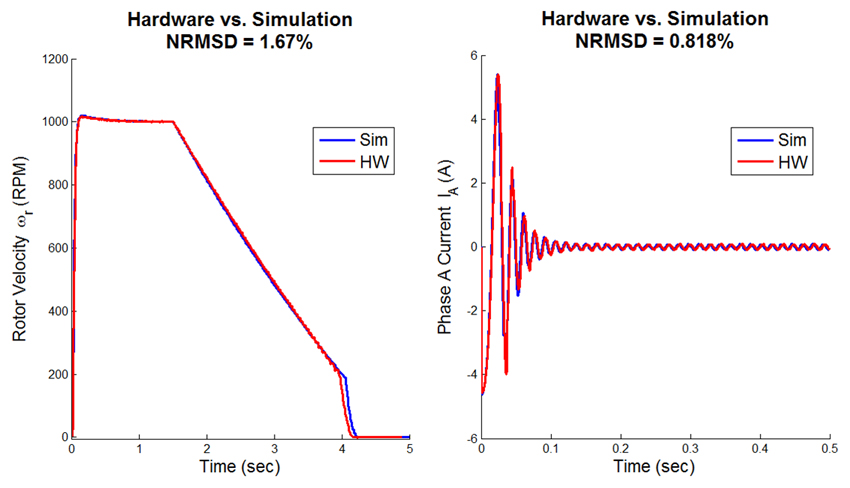
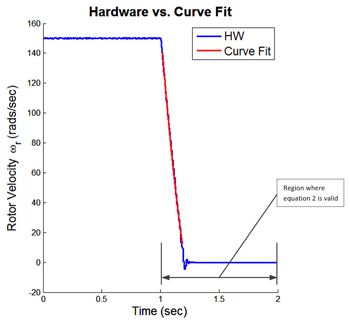
利用该模型建立并优化了永磁同步电机闭环控制系统模型。我们在模拟中使用控制器模型进行了阶跃响应和滑行测试,在硬件上使用xPC Target™交钥匙实时测试系统进行了测试。我们发现仿真结果与硬件结果非常一致,对于转子速度和电机相电流等关键信号,归一化均方根偏差(NRMSD)低于2%(图1)。
植物模型及其参数
由SimPowerSystems™开发的PMSM工厂模型包括电机和负载——本例中是一个亚克力盘。该模型有9个参数定义其行为:1个(圆盘惯性)与负载相关,8个与电机相关(图2)。
我们进行了五项测试来表征这些参数:双线摆测试、反电势测试、摩擦测试、下降测试和直流电压步长测试(表1)。在本文中,我们将重点介绍下降测试和直流电压步长测试。这些测试展示了越来越复杂的参数识别方法,并分别说明了通过曲线拟合和参数估计提取参数值。
| 测试 | 参数确定 | 识别方法 |
|---|---|---|
| 双线摆试验 | 圆盘惯量(\(H_d\)) | 计算 |
| 反电磁场测试 | 磁极数(\(P\)) 磁链常数(\(A_{pm}\)) 转矩常数(\(Kt\)) |
计算 |
| 摩擦测试 | 粘性阻尼系数(\(b\)) 库仑摩擦(\(J_0\)) |
曲线拟合 |
| 滑落的测试 | 转子惯性(\(H\) | 曲线拟合 |
| 直流电压步进试验 | 电阻(\ (R \)) 电感(\ (L \)) |
参数估计 |
表1。模型参数和为表征它们而进行的试验。
对于每个测试,我们描述测试设置,然后解释我们如何进行测试、获取数据、提取参数值并验证它。
用滑行试验表征转子惯性
为了表征转子惯性(\(H\)),我们将转子旋转到初始速度(\(\omega_{r0}\)),并测量转子海岸到停止时的转速(\(\omega\))。利用这一测量结果,可以通过将\(\omega_r\)方程与电机滑行到停止期间的测量转速进行曲线拟合来识别转子惯量。
微分方程[1]描述了电机的力学行为。设定滑行测试,使负载扭矩(\(T_{load}\))始终为\(0\)。一旦电机达到初始稳态速度,电机关闭,使电磁驱动转矩(\(T_{em}\))也为\(0\)。在这些条件下,[1]的解由\(\omega_r\)[2]的方程给出,其中
\(\omega_r\)是转子轴的转速
(\(\omega_{r0}\))是转子轴的初始转速
\(J_0\)和\(b\)分别是库仑摩擦系数和粘性阻尼系数,分别由单独的摩擦试验表征
\(T_{em}\)为电磁驱动转矩(本次测试为0)
\(T_{load}\)为加载扭矩(测试期间为0)
\[开始\{方程}{1}\ \标签压裂{d \ omega_r} {dt} = \压裂{1}{H} (T_ {em} - b识别\ omega_r-J_0-T_{负载})\{方程}结束\]
如果
\ (T_ {em} = 0 \识别)
\(T_{load} = 0\)
然后
\[开始\{方程}{2}\ \标签omega_r = (\ omega_ {r0} + \压裂{J_0} {b}) e ^{- \压裂{b} {H} t} - \压裂{J_0} {b} \{方程}结束\]
进行测试和获取数据
在实验室中,我们创建了一个开环Simulink测试模型,将电机驱动到每金宝app秒150弧度的初始速度,此时电机驱动被关闭,转子滑行到停止状态。在整个测试过程中,模型捕获了转速传感器的输出。利用Simu金宝applink Coder™和xPC Target,我们将该模型部署到xPC Target交钥匙实时系统中。我们使用xPC Target执行模型,并将转子转速数据导入MATLAB进行分析。
参数值的提取与验证
运行测试后,我们在MATLAB中绘制测量速度数据,并使用曲线拟合工具箱™拟合转子角速度方程[2](\(\omega_r\))到转子滑行到停止时的测量速度数据。利用曲线拟合得到的\(H\)值,我们从电机开始滑行的点开始计算方程[2],并将结果与原始测试数据绘制在一起(图3)。如图3所示,曲线拟合得到的\(H\)值的方程[2]密切地预测了电机滑行测试期间的速度。
我们用一个模型验证了我们的参数辨识结果。利用从滑行试验中获得的转子惯性值(在我们的PMSM模型中为3.2177e-06 Kg m^2),我们在Simulink中对滑行试验进行了仿真。金宝app然后,我们将模拟结果与实测结果进行比较并绘制(图4)。结果非常匹配,归一化均方根偏差(NRMSD)约为2%。

用直流电压阶跃试验表征电阻和电感
在直流电压步进测试中,在电机a相和B相连接上施加直流电压,并测量产生的电流。在电气方面,在这些条件下,三相永磁同步电动机就像一个具有两个串联电阻和两个串联电感的电路(图5)。
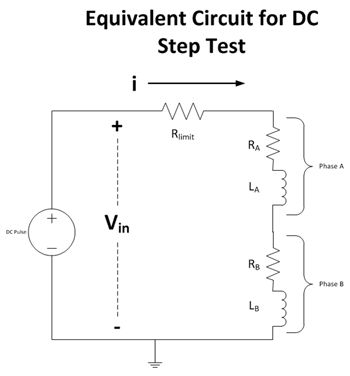
测量到的电流(\(i\))用于寻找电阻和电感参数值。在测试过程中,转子保持不动,以避免与反电动势波形复杂的分析,这往往反对电流流动。为了避免在转子不动的情况下烧毁电机,添加了限流电阻(\(R_{limit}\)),并使用步进脉冲而不是稳定的直流电压。
进行测试和获取数据
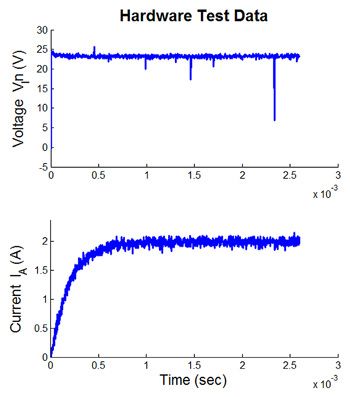
我们再次使用xPC Target和xPC Target交钥匙实时系统进行测试。在Si金宝appmulink中,我们开发了一个模型,可以产生一系列持续时间约为2.5毫秒的24伏脉冲。我们使用Simulink Coder将该模型部署到我们的xPC目标系统,并将电压脉冲应用于PMSM的A相和B金宝app相端子。我们使用示波器测量了施加的电压和流过电机的电流,并使用仪表控制工具箱™将测量数据读取到MATLAB中,在MATLAB中绘制出结果(图6)。
参数值的提取与验证
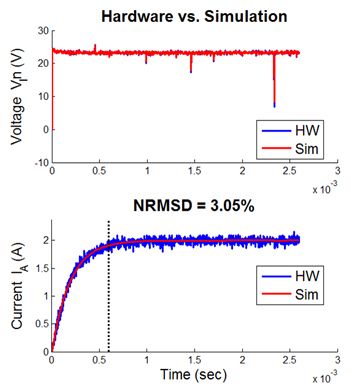
从测量数据中提取相电阻只需要应用欧姆定律(\(R = V/I\)),使用电压和电流的稳态值。对于PMSM,我们计算的电阻为23.26伏特/ 2.01安培= 11.60欧姆。通过减去10欧姆(限流电阻的值),并将结果除以2以考虑串联的两相电阻,我们计算出电机相电阻为0.8欧姆。
表征电感需要更复杂的方法。乍一看,似乎我们可以使用曲线拟合,就像我们在描述转子惯性时所做的那样。然而,由于直流电源的内阻,测试时进入电路的电流为0时,测量到的直流电压从测试开始时的初始值24伏衰减到电流进入电路后的稳态值23.26伏。由于输入电压不是一个纯阶跃信号,用曲线拟合串联RL电路方程的解的结果是不准确的。
为了克服这一困难,我们选择了使用参数估计和Simulink Design Optimization™的更健壮的方法。金宝app这种方法的优点是它既不需要纯步进输入,也不需要曲线拟合。
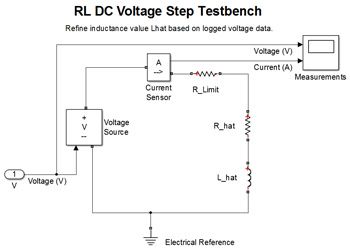
我们使用Simulink和Simscape™对电机等效串联RL电路进行建模(图7)。Simulink Design金宝app Optimization将测量电压作为模型的输入,在已知限阻电阻(R_limit)和电机相阻(R_hat)的情况下,估算电感(L_hat)的值,使模型预测的电流与实测电流数据尽可能吻合。
为了验证我们获得的相电阻(0.8欧姆)和电感(1.15毫亨)的值,我们将这些值插入到PMSM模型中,并使用与我们用于刺激实际电机相同的输入来刺激模型。我们将模拟结果与测量结果进行了比较(图8)。结果非常吻合,NRMSD约为3%。
利用植物模型设计控制器
在确定和验证所有关键参数后,我们的PMSM工厂模型已经准备好用于电机控制器的开发。我们使用Simu金宝applink Design Optimization来调整控制器外环(速度调节器)的比例增益和积分增益。我们运行闭环仿真来验证控制器模型的功能,并使用Simulink Coder从模型生成代码,我们将其部署到xPC Target交钥匙实时目标机。金宝app
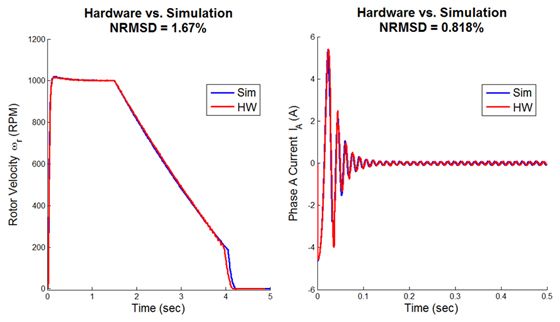
作为最后的控制器验证步骤,我们在Simulink中运行了阶跃响应和向下模拟,并在xPC Target交钥匙实时系统上使用部署的控制器代码进行了硬件测试。金宝app我们比较了转子速度和相电流的仿真和硬件测试结果,再次发现模型和硬件之间非常接近,NRMSD在两种情况下都低于2%(图9)。
总结
PMSM装置模型的开发突出了两个参数识别试验。通过传感器采集数据进行下潜测试,通过仪表控制工具箱采集数据进行直流电压步进测试。采用曲线拟合的方法提取跌落试验数据,采用参数估计的方法提取直流电压阶跃试验数据。我们通过将模拟结果与测量测试数据进行比较,验证了所有参数值,这使我们能够在开发和调优控制器时产生一个可以信任的工厂模型。
所有这些工作都可以在开发过程的早期完成,远在控制系统的嵌入式代码生成之前,使工程师能够在硬件测试开始之前发现并消除需求和设计中的问题。这些好处通常远远超过与创建工厂模型相关的成本,特别是如果模型可以在其他项目上重用的话。
我们要感谢密歇根大学的希思霍夫曼教授的贡献,他推荐了描述永磁同步电机的测试程序,并允许我们在这个项目的初始阶段使用他的实验室设施。