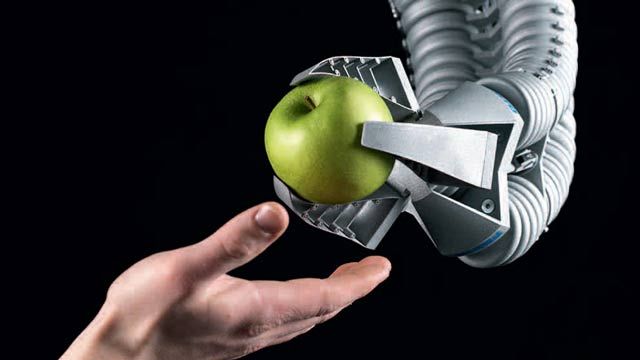
受象鼻运动的启发,Festo AG开发了仿生操作助手,这是一种可以与人类紧密安全工作的机电手臂。与工业机械臂不同,仿生搬运助手的设计是直接与人类互动,而工业机械臂通常被封闭在安全笼中以保护附近的工人。偶然接触机电臂是无害的,因为该臂由压缩空气驱动的轻质聚合物组件制成。此外,气动系统由一个控制系统进行管理,一旦发生碰撞,该控制系统将立即屈服。
费斯托研究人员利用MATLAB开发了控制系统®和Sim金宝appulink®用于基于模型的设计,然后使用Simulink PLC编码器在可编程逻辑控制器(PLC)上实现™. Festo机电系统研究部门负责人Rüdiger Neumann博士说:“通过基于模型的设计,金宝app我们可以在相同的工具环境中建模、模拟、优化和生成代码来实现控制器。”。“因此,我们的开发过程更加高效,不仅适用于仿生处理助手,而且适用于任何需要控制器实现并生成代码的项目。”