轻型飞机设计
该模型展示了如何使用MathWorks®产品,利用轻型飞机的设计来解决飞机设计下载188bet金宝搏的技术和工艺挑战。
要运行此示例模型,您需要Aerospace BlockSet™软件及其所需产品。下载188bet金宝搏您需要进一步探索此模型下载188bet金宝搏的其他产品是:
控制系统工具箱™
金宝app仿真软件®控制设计™
金宝app仿真软件设计优化™®
设计过程是迭代的;在选择最后一个之前,您将尝试许多车辆配置。理想情况下,在构建任何硬件之前执行迭代。挑战在于快速执行迭代。通常情况下,不同的小组对过程的不同步骤进行工作。这些群体之间的有效合作和一套正确的工具对于应对这一挑战至关重要。
定义车辆几何
这种轻量级飞机的几何形状来自参考1.这个几何形状的原始设计目标是一架四座通用航空飞机,安全,易用,易于维护特定的使命和性能约束。有关这些约束的更多详细信息,请参阅参考文献1。
该飞机的潜在性能要求包括:
级巡航速度
容许爬升率
可接受的失速速度。
对于飞机的飞行控制,爬升速率是设计要求,假设在2000米时爬升速率大于2米/秒(m/s)。
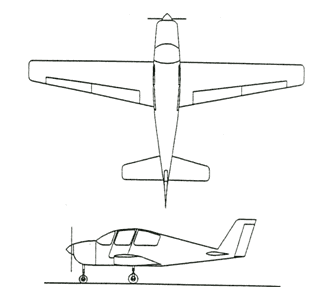
图1:轻型四座单翼机[1]。
确定车辆空气动力学特性
飞机的几何结构决定了它的气动特性,从而决定了它的性能和操纵品质。一旦选择了几何构型,就可以通过以下方法获得气动特性:
分析预测
缩放模型的风洞测试或全尺寸原型
飞行测试。
虽然风洞测试和飞行测试提供了高保真度的结果,但它们是昂贵和耗时的,因为它们必须在实际的硬件上执行。最好是在飞机的几何形状确定后使用这些方法。请注意:分析预测是在设计早期估算气动特性的一种更快、成本更低的方法。
在本例中,我们将使用Digital Datcom(一种流行的软件程序)进行分析预测。美国空军将其开发为数据概要(DATCOM)的数字版本。这个软件是公开的。
首先,创建一个数字Datcom输入文件,该文件定义了我们飞机的几何配置和获得空气动力系数所需的飞行条件。
美元FLTCON NMACH = 4.0马赫(1)= 0.1,0.2,0.3,0.35 $ $ FLTCON NALT = 8.0, ALT (1) = 1000.0, 3000.0, 5000.0, 7000.0, 9000.0, 11000.0, 13000.0, 15000.0 $ $ FLTCON NALPHA = 10, ALSCHD (1) = -16.0, -12.0, -8.0, -4.0, -2.0, 0.0, 2.0, ALSCHD(8) = 4.0, 8.0, 12.0,循环= 2.0 $ $ OPTINS SREF = 225.8, CBARR = 5.75, BLREF = 41.15 $ $合成器XCG = 7.9, ZCG = -1.4, XW = 6.1, ZW = 0.0, ALIW = 1.1, XH = 20.2,ZH型= 0.4,ALIH = 0.0十五= 21.3,ZV = 0.0, VERTUP = .TRUE。$ $身体NX = 10.0 X (1) = -4.9, 0.0, 3.0, 6.1, 9.1, 13.3, 20.2, 23.5, 25.9, R (1) = 0.0, 1.0, 1.75, 2.6, 2.6, 2.6, 2.0, 1.0, 0.0 $ $ WGPLNF CHRDTP = 4.0, SSPNE = 18.7, SSPN = 20.6, CHRDR = 7.2, SAVSI = 0.0, CHSTAT = 0.25, TWISTA = -1.1, SSPNDD = 0.0, DHDADI = 3.0, DHDADO = 3.0,类型= 1.0 $ $ HTPLNF CHRDTP = 2.3, SSPNE = 5.7, SSPN = 6.625, CHRDR = 0.25, SAVSI = 11.0,CHSTAT = 1.0, TWISTA = 0.0, = 1.0 $ $ VTPLNF CHRDTP = 2.7, SSPNE = 5.0, SSPN = 5.2, CHRDR = 5.3, SAVSI = 31.3, CHSTAT = 0.25, TWISTA = 0.0, = 1.0 $ $ SYMFLP型NDELTA = 5.0,δ(1)= -20,-10,0,10,20,PHETE =。0522年,CHRDFO CHRDFI = 1.3 = 1.3, SPANFI = 1。SPANFO = 6.0, FTYPE = 1.0, CB = 1.3, TC =。0225年,PHETEP = .0391 NTYPE = 1。$ naca-w-4-0012 naca-h-4-0012 caseid skyhogg机身-机翼-水平尾翼-垂直尾翼配置阻尼下一个案例
数字数据组播在指定的飞行条件下提供车辆的空气动力学稳定性和控制衍生物和系数。飞行控制工程师可以通过检查稳定性和控制衍生物来深入了解车辆的性能和处理特性。我们必须将此数据导入Matlab®技术计算环境以进行分析。通常,这是一个手动过程。
使用Aerospace Toolbox软件,我们可以只需一个命令将多个数字Datom输出文件带入MATLAB技术计算环境。无需手动输入。每个数字DATCOM输出都将MATLAB技术计算环境作为结构单元格阵列导入,每个结构对应于不同的数字DATCOM输出文件。导入数字Datom输出后,我们可以通过数字数据组播运行多种配置,并比较MATLAB技术计算环境中的结果。
在我们的模型中,我们需要检查飞行器是否天生稳定。为此,我们可以使用图2来检查由相应系数Cm所描述的俯仰力矩是否为飞机提供了一个恢复力矩。恢复力矩使飞机的攻角恢复为零。
在构型1(图2)中,当某些攻角小于零时,Cm为负。这意味着这种配置将不会为那些消极的攻角提供一个恢复时刻,也不会提供理想的飞行特性。配置2通过将重心向后移动解决了这个问题。移动重心产生一个Cm,为所有的负迎角提供一个恢复时刻。

图2:数字Datcom俯仰力矩系数的可视化分析。
创造飞行车模拟
一旦我们确定了空气动力稳定性和控制导数,我们可以建立一个开环工厂模型来评估飞机的纵向动力学。一旦模型完成,我们可以通过使用Simulink®Report Generator™软件将模型导出到Web视图,向同事展示它,包括那些没有Simulink®软件的同事。金宝appWeb视图是模型的交互式HTML副本,它允许您导航模型层次结构并检查子系统、块和信号的属性。
典型的工厂模型包括以下组件:
运动方程:计算车辆位置和力量和时刻的态度
力和时刻:计算空气动力学,重力和推力力量和时刻
致动器位置:根据执行器命令计算位移
环境:包括风扰动、重力和大气的环境影响
传感器:对测量设备的行为进行建模
我们可以使用Aerospace Blockset™块实现大部分功能。该模型用橙色突出显示包含航空航天模块集模块的子系统。它以红色突出航空方块组块。

图3:顶级轻型飞机模型
首先,我们使用来自Aerospace Blockset库中的运动方程库(equation of Motion library)的3DOF块构建一个植物模型(图4)。这个模型将帮助我们确定飞行器是否纵向稳定和可控。我们设计的子系统具有与六自由度(DOF)版本相同的接口。当我们对三自由度性能、稳定性和可控性感到满意时,我们可以实现六自由度版本,在其他控制表面几何图形上迭代,直到我们从飞机上实现所需的行为。

图4:运动方程实现使用三维欧拉块从航空航天块集库。
为了计算作用在我们车辆上的空气动力和力矩,我们使用来自航空航天区块集库的数字Datcom力和力矩块(图5)。该块使用了Aerospace Toolbox从数字Datcom导入空气动力学系数时创建的结构。
对于某些数字Datom案例,动态衍生物仅具有第一个攻角的值。缺少的数据点可以填充有第一攻角的值,因为这些衍生物与攻击角度无关。要查看如何填写数字Datom数据点中缺少数据的示例代码,您可以检查asbPrepDatcom函数。

图5:气动力和力矩部分由航空块组数字数据通信力和力矩块实现。
我们还使用Aerospace Blockset块创建驱动器、传感器和环境模型(分别如图6、7和8所示)。请注意:除了创建型号的以下部分外,我们使用标准航空航天块集合块,以确保我们从车身轴转换为正确的风轴。

图6:执行器模型使用航空航天块组块。
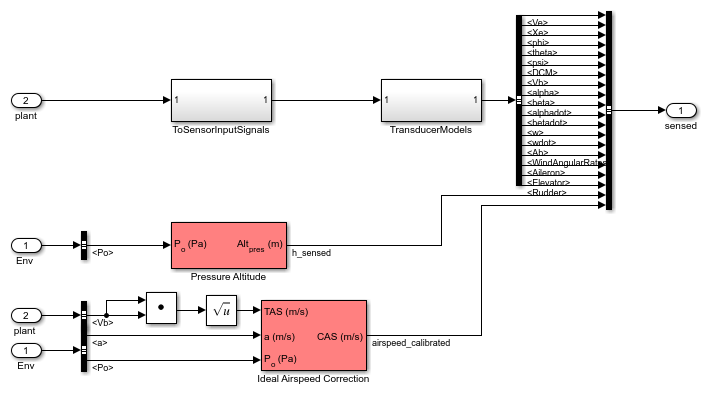
图7:使用航空航天块组块实现飞行传感器模型。
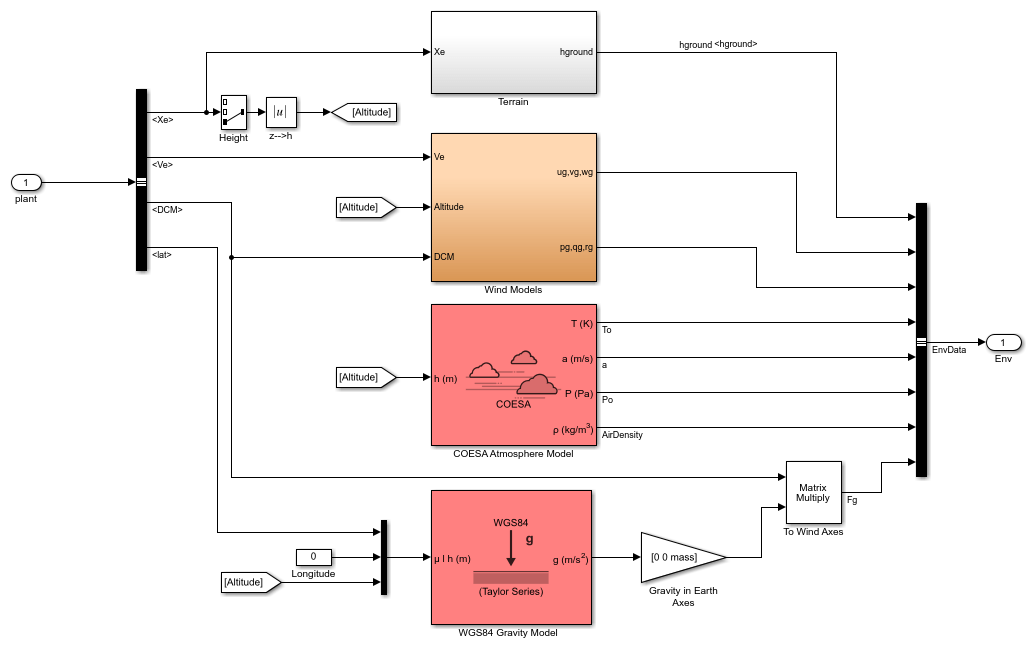
图8:风,大气和重力的环境效应使用航空航天块组块。
设计飞行控制法
一旦我们创建了Simulink工厂模型,我们就设计金宝app了一个纵向控制器,可以控制电梯的位置来控制高度。本设计选用的传统双环反馈控制结构(图9)具有控制高度的外环(补偿器C1为黄色)和控制俯仰角的内环(补偿器C2为蓝色)。图10显示了Simulink模型中相应的控制器配置。金宝app

图9:纵向控制器的结构。
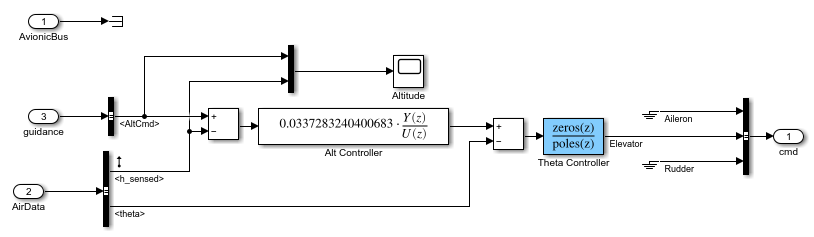
图10:在Simulink模型中的纵向控制器。金宝app
使用Sim金宝appulink®ControlDesign™软件,我们可以使用一系列工具和技术直接在Simulink中直接调整控制器。
使用Simulink金宝app Control Design界面,我们通过以下方式设置控制问题:
两个控制器模块
闭环输入或高度命令
闭环输出信号或感应高度
稳定状态或微调状态。
利用这些信息,Simulink控制设计软件自动计金宝app算模型的线性近似值,并确定设计中使用的反馈回路。为了设计内环和外环的控制器,我们对开环使用根轨迹图和bode图,对闭环响应使用阶跃响应图(图11)。
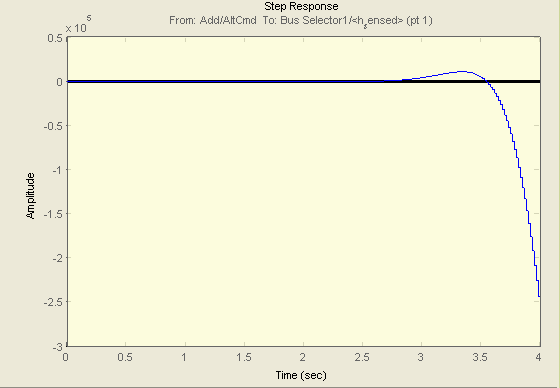

图11:在控制器调优前设计图。
然后,我们使用这些图交互地调整内部环和外环的补偿器。因为绘图随着我们调整补偿器时实时更新,我们可以看到这些变化对其他环路和闭环响应的耦合效果。
要使多环设计更系统,我们使用顺序循环闭合技术。这种技术让我们在设计过程中逐步考虑到其他循环的动态。使用Sim金宝appulink控制设计,我们将内环配置为在外环控制器的输出端(图12中的C1)处具有额外的环路开口。该方法从外循环与内部环路分离,并简化了内环控制器设计。设计内环后,我们设计外环控制器。图13显示了最终修剪操作点的所产生的调谐补偿器设计。
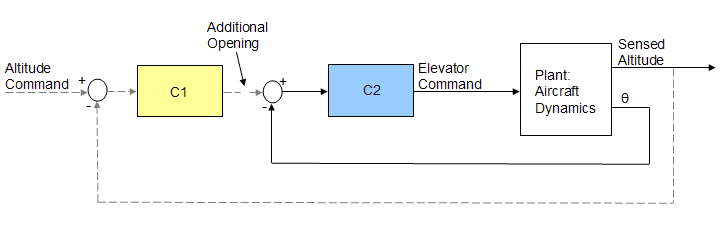
图12:内环的框图,通过配置一个额外的环路开口来隔离。
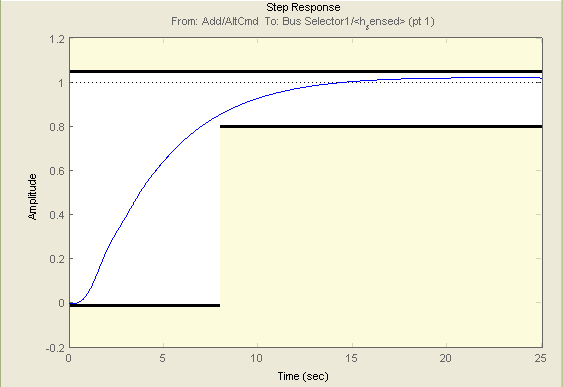

图13:控制器调谐后修剪条件的图表。
可以通过多种方式在Simulink控制设计软件中调整控制器。例金宝app如:
您可以使用图形化方法,交互地移动控制器增益、极点和零点,直到获得满意的响应(图13)。
您可以使用Simulin金宝appk®设计优化™ Simulink控制设计软件中的软件,用于自动调整控制器。
指定频域要求(如增益裕度和相位裕度以及时域要求)后,Simulink Design Optimization软件会自动调整控制器参数以满足这些要求。一旦我们开发出可接受的控制器设计,Simulink模型中的控制块将自动更新。参见示例金宝app使用控制系统设计器入门(控制系统工具箱)在控制系统工具箱的例子和使用补偿器金宝app编辑器调整Simulink块(金宝app仿真软件控制设计)在Si金宝appmulink控制设计示例中,有关调谐控制器的更多信息。
现在,我们可以使用飞行控制逻辑运行非线性仿真,并检查控制器性能是否可以接受。图15显示了我们的非线性Simulink模型的闭环模拟结果,该模型用于从修剪的工作点开始,将请求的高度从2000米增加到2050米。虽然飞行员要求改变高度,但实际控制员的高度请求率是有限的,以提供乘客舒适和安全的乘坐。金宝app

图14:最后的检查是用我们的控制器设计运行非线性模拟,并检查高度(紫色)以稳定和可接受的方式跟踪高度要求(黄色)。
我们现在可以使用这些模拟结果来确定我们的飞机设计是否满足其性能要求。要求爬升速率要在每秒2米以上。如图所示,飞机在不到20秒的时间内从2000米爬升到2050米,爬升速度超过2.5米/秒。因此,这种特殊的几何配置和控制器设计满足我们的性能要求。
除了传统的时间图,我们还可以使用Aerospace Blockset与FlightGear的接口来可视化仿真结果(图15)。

图15:使用Aerospace Blockset接口将仿真结果可视化到FlightGear。
我们还可以使用Aerospace Toolbox界面来使用模拟结果或实际飞行测试数据来播放Matlab数据。
完成设计过程
接下来的步骤包括
构建硬件在环系统以测试实时性能
构建实际的车辆硬件和软件
进行飞行测试
飞行试验数据的分析与可视化。
因为这些步骤不是本示例的重点,所以我们不在这里进行描述。相反,我们将简单地提到,它们都可以使用适当的工具进行流线化和简化,如Embedded Coder®、Simulink®Real-Time™和Aerospace Toolbox软件。金宝app
总结
在这个例子中,我们展示了如何:
使用Digital Datom和Aerospace Toolbox软件快速开发机车初始设计,并评估不同的几何配置。
使用Si金宝appmulink和Aerospace Blockset软件快速创建车辆的飞行模拟。
利用Si金宝appmulink Control Design软件设计飞行控制律。
这种方法使您能够在任何硬件制造之前就确定车辆的最佳几何配置,并评估其性能和操纵质量,从而降低设计成本并消除错误。此外,使用单一的工具链有助于促进不同组之间的沟通,加快设计时间。
工具书类
加农,加巴德,迈耶,T,莫里森,S,斯科西克,M,伍兹,D。“猪场D-200空中猪猪设计方案”1991-1992年AIAA®/通用动力公司团队飞机设计大赛。
Turvesky, A., Gage, S. and Buhr, C.,加速飞行器设计,Matlab®摘要,2007年1月。
[3] Turvesky, A., Gage, S., and Buhr, C.,“基于模型的新型轻型飞机设计”,AIAA论文2007-6371,AIAA建模与仿真技术会议和展览,Hilton Head,南卡罗来纳,2007年8月20-23日。
您还可以从以下列表中选择网站: