自动驾驶的工具箱
设计,模拟和测试ADAS和自动驾驶系统

自动驾驶工具箱™ 提供设计、模拟和测试ADAS和自动驾驶系统的算法和工具。您可以设计和测试视觉和激光雷达感知系统,以及传感器融合、路径规划和车辆控制器。可视化工具包括用于传感器覆盖、检测和跟踪的鸟瞰图和范围,以及用于视频、激光雷达和地图的显示。工具箱允许您导入和使用这里的高清实时地图数据和OpenDRIVE®道路网络。
使用地面真相标签应用程序,您可以自动标记地面真相,以训练和评估感知算法。对于硬件在环(HIL)测试和感知、传感器融合、路径规划和控制逻辑的桌面模拟,可以生成和模拟驾驶场景。您可以在照片级真实感三维环境中模拟相机、雷达和激光雷达传感器的输出,并在2.5-D模拟环境中模拟传感器对对象和车道边界的检测。
自动驾驶工具箱提供共同ADAS和自动驾驶功能,包括FCW,AEB,ACC,LKA和停车代客参照应用实例。该工具箱支持C / C 金宝app++代码生成用于快速原型和HIL检测,与传感器融合,跟踪,路径规划,和车辆控制器算法的支持。
开始:


检测车辆和车道的视觉感知系统的参考的应用程序。
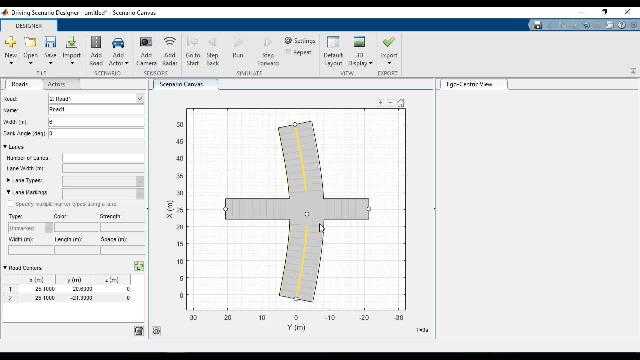
长方体驱动仿真
产生从雷达和摄像机传感器模型合成的检测,并把这些检测到驾驶情形,测试是否可以基于长方体模拟器自动驾驶算法。定义路网,演员和传感器使用驱动方案设计的应用程序。进口预构建欧洲NCAP测试和OpenDRIVE道路网络。
虚幻引擎驾驶情景模拟
在使用虚拟引擎渲染的三维模拟环境中开发、测试和可视化驾驶算法的性能®从史诗游戏®。

使用3D仿真环境,以在不同情况下记录合成的传感器数据,开发车道标记检测系统,以及测试该系统。

评估对地面实况车道检测输出。

单眼摄像机传感器的模拟输出。

检测和激光雷达点云跟踪车辆。

访问这里的高清动态地图数据
从HERE HD Live map web服务读取地图数据,包括包含详细道路、车道和本地化信息的平铺地图层。

使用这里的高清实时地图来验证车道配置。
可视化地图数据
采用流坐标,因为他们驾驶的车辆的位置地图。


三维环境下的驾驶路径规划与可视化

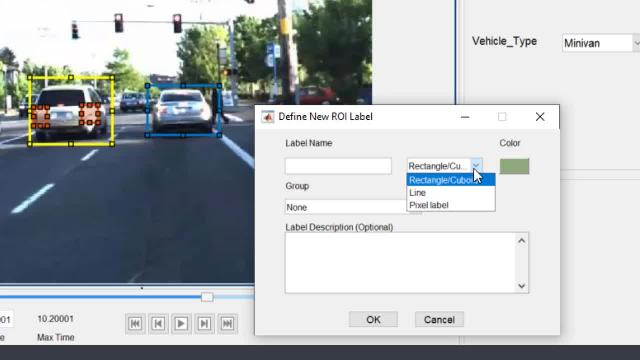
多信号地面实况标签
同时标签同步激光雷达和视频信号
激光雷达标记
标记激光雷达点云以训练深度学习模型
3D场景定制
使用场景3D环境模拟驾驶情况下在虚幻编辑器中创建
激光雷达传感器模型
从编程驱动场景生成合成点云
鸟瞰镜增强
可视化雷达和从三维模拟传感器数据的激光雷达,和可视化行为者定制模块
这里高清现场地图场景中的道路
使用从高清地理地图导入的道路数据创建驾驶场景
看到发行说明对任何这些特征和对应的功能的详细说明。