激光雷达的工具箱
设计、分析和测试激光雷达处理系统
LIDAR Toolbox™提供用于设计,分析和测试LIDAR处理系统的算法,功能和应用。您可以执行对象检测和跟踪,语义分割,形状配件,激光雷达登记和障碍物检测。LIDAR Toolbox支金宝app持Lidar-Camera Cross校准,用于组合计算机视觉和LIDAR加工的工作流程。
您可以使用深度学习和机器学习算法培训定制检测和语义分割模型,例如PoinseG,Pointpillars和SqueezeSegv2。LIDAR Labeler App支持Lid金宝appar Point云的手动和半自动标记,用于培训深度学习和机器学习模型。该工具箱可让您从Velodyne流中流®并读取Velodyne和IBEO激光雷达传感器记录的数据。
LIDAR工具箱提供了参考示例,说明了LIDAR处理对感知和导航工作流的使用。大多数工具箱算法支持C / C ++代码生成,用金宝app于与现有代码,桌面原型设计和部署集成。
开始:
激光雷达的语义分割
在LIDAR数据上列车,评估和部署语义分段网络,包括POINSEG和SCHEEZESEGV2。

使用SqueezeSegV2进行语义分割。
激光雷达点云的目标检测
在LIDAR点云中的物体周围检测和适合定向边界框。设计,列车和评估强大的探测器,如Pointpillars网络。

激光标签
使用lidar Labeler App应用内置或自定义算法来自动化激光雷达点云标记,并评估自动化算法的性能。

激光雷达贴标签机应用。
激光器和相机校准
使用lidar camera Calibrator App估算激光雷达和相机之间的刚性变换矩阵。

LIDAR相机校准器应用程序
Lidar-Camera集成
将LIDAR和相机数据熔断到图像上的LIDAR点,LIDAR点云中的熔丝颜色信息,并使用来自共同定位的相机的2D边界盒估算LIDAR中的3D边界框。
激光雷达处理算法
将无组织的点云转换为有组织的点云。应用函数和算法进行地面分割,下采样,中值滤波,正态估计,转换点云,提取点云特征。

激光雷达点云的地面分割
2D LIDAR Slam.
从二维激光雷达扫描中实现同步定位和测绘(SLAM)算法。使用真实或模拟传感器读数估计位置并创建二进制或概率占用网格。

Velodyne LiDar传感器采集
从Velodyne激光雷达传感器获取实时激光雷达点云,在MATLAB中可视化,开发激光雷达传感应用。

开始在MATLAB中获取激光雷达。
阅读和写入LIDAR点云数据
读取不同格式的激光雷达数据,包括PCAP、LAS、ibeo、PCD和PLY。将激光雷达数据写入PLY和PCD文件。

读取LAS格式的激光雷达点云数据。

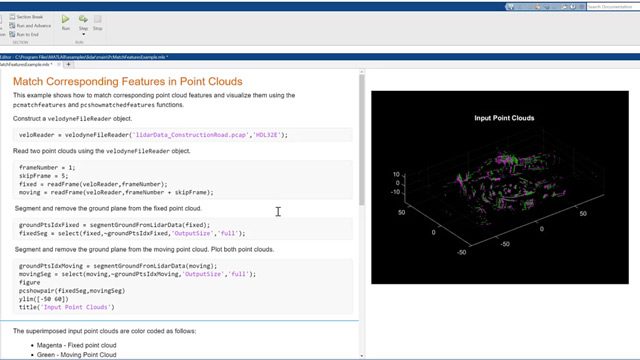
激光雷达点云特征提取与匹配。
LIDAR点云注册
将地面和航空激光雷达数据的点云序列拼接在一起,实现三维SLAM算法。