走鹃
设计3D场景的自动驾驶模拟
RoadRunner是一个交互式编辑器,它可以让你设计3D场景来模拟和测试自动驾驶系统。您可以通过创建特定区域的路标和标记来定制道路场景。你可以插入标志,信号,护栏,道路损坏,以及树叶,建筑物,和其他3D模型。RoadRunner提供设置和配置交通信号定时、相位和十字路口车辆路径的工具。
RoadRunner支金宝app持激光雷达点云、航空图像和GIS数据的可视化。您可以使用OpenDRIVE导入和导出道路网络®。与路跑内置3D场景可以在FBX导出®、glTF™、OpenFlight、OpenSceneGraph、OBJ和USD格式。导出的场景可以用于自动驾驶模拟器和游戏引擎,包括卡拉,Vires VTD, NVIDIA DRIVE Sim®, LGSVL,百度阿波罗®,团结®,不真实®发动机。
走鹃资产库让你快速填充您的3D场景有一大套的现实和视觉上一致的3D模型。
开始:
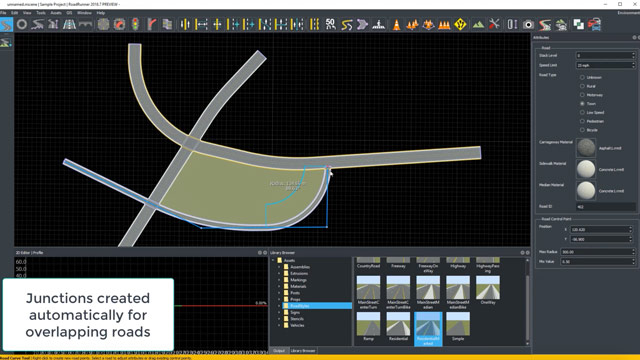
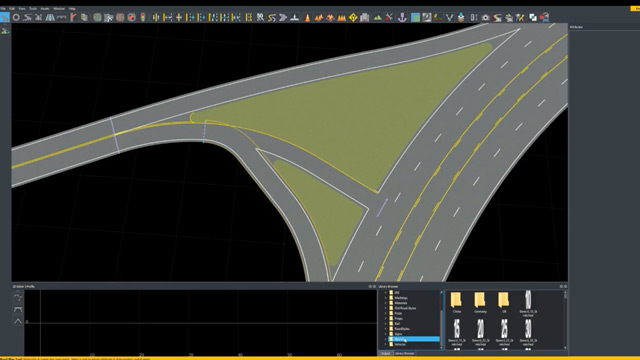
复杂交叉口
设计复杂的交叉路口,包括合并、分割和环形路。
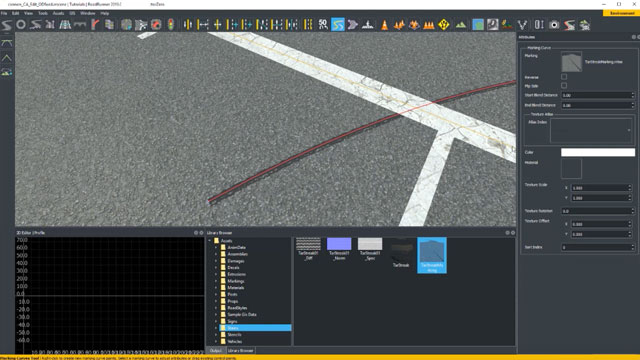
道路及路面标记
添加带有车道标记、模板和自定义图形的详细路面。
走鹃资产库
充分利用它提供上百种型号,包括道路和公路标志,交通信号,路面标志,树木,栅栏和道路的纹理,如裂纹和漏油预建资源的库。

利用来自RoadRunner资产库的预构建资产。
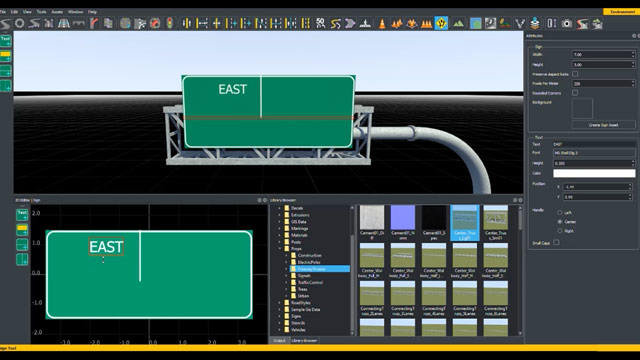
定制的路标
在构建自定义标志时,使用集成的道路标志编辑器来组合文本和图形。使用Unicode支持创建国际和特定于区域的符号。金宝app
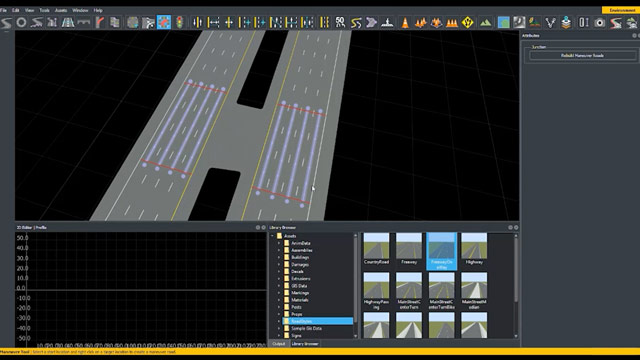
复杂的道路网
生成具有车道和交叉口连接性的道路网络,用于汽车和交通模拟环境。
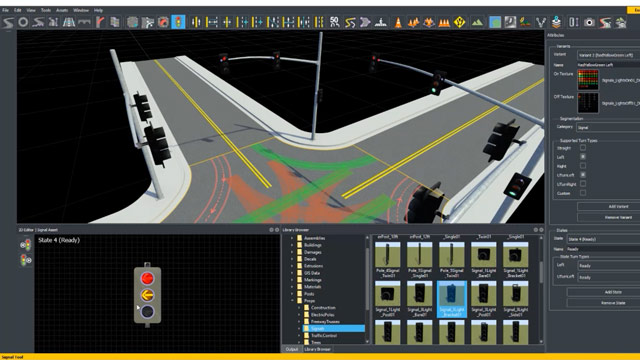
交通信号
编辑信号阶段和时间与综合信号时间线和交互式视口控制。
通过导入航拍图像,高程数据,激光雷达点云和路线图,在路跑准确地表示物理位置构建3D场景与真正的位置。

将高程地图导入到RoadRunner中。
在RoadRunner中创建的场景导出到行业标准格式,包括openDRIVE、FBX、glTF、OpenFlight、OpenSceneGraph、OBJ和USD。RoadRunner场景出口到各种模拟器和游戏引擎,包括卡拉,Vires VTD, NVIDIA DRIVE Sim, LGSVL,百度阿波罗,Unity,和虚幻引擎。

从路跑导出场景。
