主要内容
激光雷达相机校准器
交互式估计激光雷达传感器与摄像机之间的刚性变换
描述
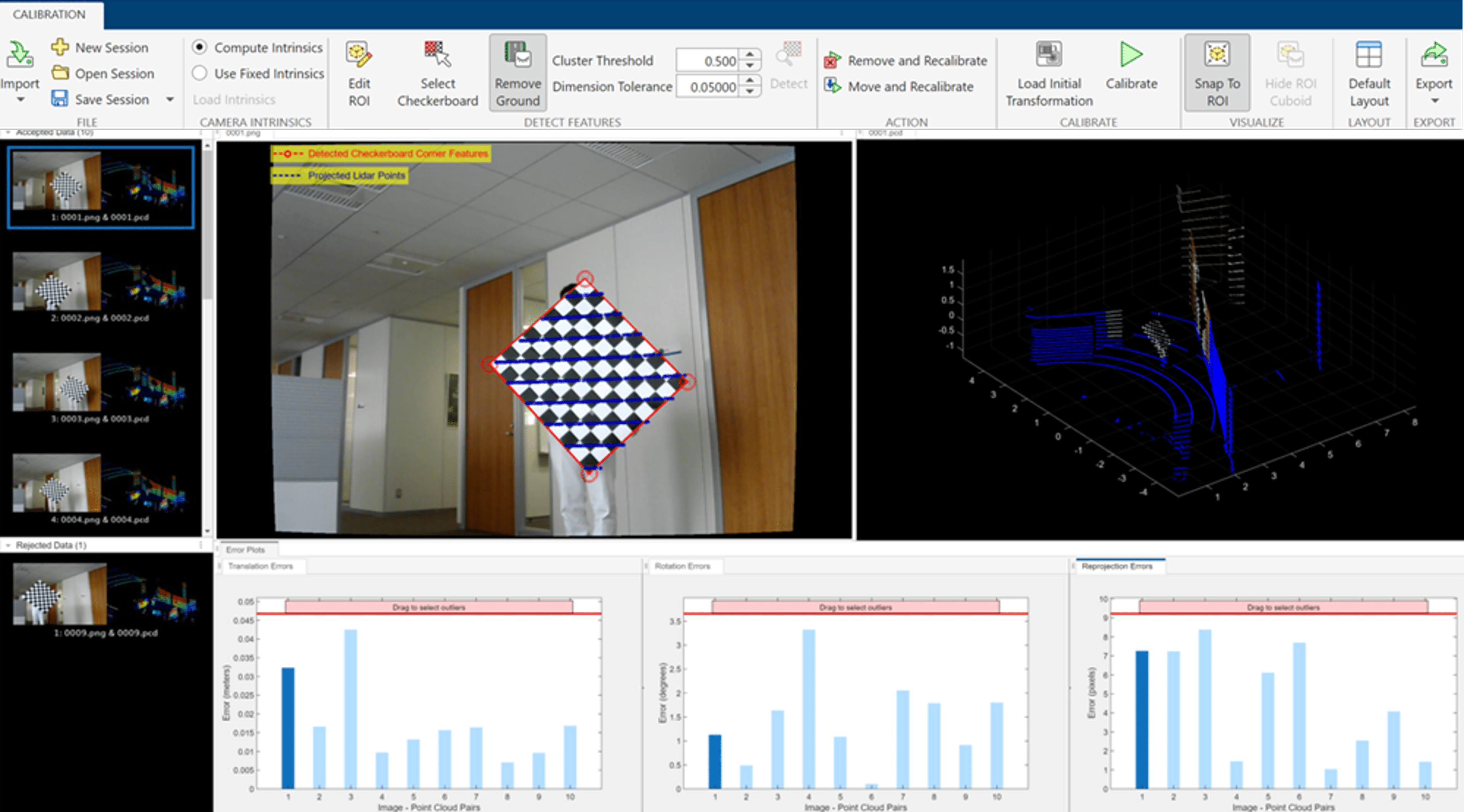
的激光雷达相机校准器App可以让你交互式地估计激光雷达传感器和相机之间的刚性转换。该应用程序通过读取用户捕获的校准图像和点云来进行校准。该应用程序读取PLY和PCD格式的点云数据,以及支持的任何格式的图像金宝appimformats.
使用该应用程序,你可以:
从图像和点云数据中检测、提取和可视化棋盘特征。
利用特征检测结果估计相机与激光雷达之间的刚性变换。
使用校准结果来融合来自两个传感器的数据。您可以可视化的点云数据投影到图像上,并从图像的颜色或灰度信息与点云数据融合。
查看绘制的校准误差度量。您可以使用阈值线删除离群值,并重新校准剩余的数据。
在棋盘周围定义感兴趣区域(ROI),以减少转换估计过程所需的计算资源。
将转换和错误度量数据导出为工作区变量或MAT文件。你也可以创建一个MATLAB®整个工作流的脚本。
打开Lidar Camera Calibrator App
MATLAB工具条:关于应用程序选项卡,在图像处理与计算机视觉,单击应用程序图标。
MATLAB命令提示符:输入
lidarCameraCalibrator.
编程使用
限制
的激光雷达相机校准器应用程序有这些限制:
点云轴工具和总体响应速度在Linux中都比较慢®机器。
生成的脚本出口>生成MATLAB脚本不包含任何手动选择的棋盘区域使用选择棋盘特性。在脚本中,在指定的ROI中检测棋盘区域。
手动选择棋盘区域后使用选择棋盘当用户返回校准选项卡时,只有在查看整个点云时(即当),才能看到选定的点(用红色高亮显示)SnapToROI按钮没有)。
另请参阅
功能
介绍了R2021a
你也可以从以下列表中选择一个网站: