司机命令
描述
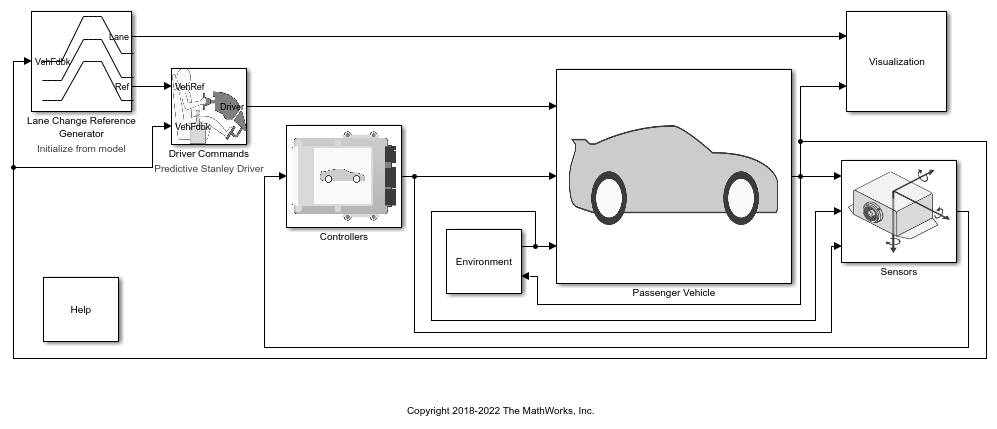
的司机命令块实现了驱动程序模型,参考应用程序使用产生加速度,制动装置和转向命令。默认情况下,如果你选择参考发生器块参数使用maneuver-specific驱动程序、初始位置和场景,参考应用程序选择司机为您指定的操作。
例子
港口
输入
输出
参数
版本历史
介绍了R2019a
的司机命令块实现了驱动程序模型,参考应用程序使用产生加速度,制动装置和转向命令。默认情况下,如果你选择参考发生器块参数使用maneuver-specific驱动程序、初始位置和场景,参考应用程序选择司机为您指定的操作。
介绍了R2019a