在过去的两个视频,我们走过一个模糊推理系统是如何工作的。所以,在这个视频中,我们要把知识和展示设计一个模糊推理系统的一种方法。要做到这一点,我们将开发一个模糊推理控制器能够平衡车杆。我想向你们展示如何设计一个模糊逻辑控制器对系统仅使用经验和直觉——没有必要的数学模型。我认为你会吃惊地发现它是多么的简单设置如果你有一个好的理解的系统行为。所以,我希望你留下来。我是布莱恩,欢迎来到MATLAB技术说话。
这是购物车/杆问题。这是一个非常标准的学术例子所以我想用一个例子就好了,你可能已经知道如何使用其他控制方法解决。它是这样运作的。杆被拉下的恒力重力和自由旋转轴心点。购物车可以来回滚动,我们可以应用一个外力加速车左和右。我们有四个州,我们测量:极角和角速度和车的位置和速度。如果你想复制这个例子中,这些都是这一特定系统的物理参数。
好的,所以总体框图看起来是这样的。力进入购物车/杆动态系统和四个状态变量。然后一个模糊逻辑控制器使用的一个或多个输出变量来确定适当的力量,使杆直立。很简单,对吧?
好吧,让我们去仿真软件并开始设计。金宝app我已经把几个街区在这个仿真软件模型。金宝app这一块是购物车的动力学和杆系统,你可以看到车作为输入和输出四个州。杆初始化完美的平衡,因为没有其他外部干扰在这个模型中,我打扰它通过注射小脉冲时间= 1秒就把车移动一点,让杆倒。这个街区带来了动画,这样我们可以看到系统做什么比看更容易阴谋。
让我们开始这个,看看会发生什么。购物车和杆开始完美的平衡,然后脉冲系统移动,和杆落在周围循环。我忘了说,这个系统没有阻尼,所以极永远不会来休息。好了,这是有趣的但是现在让我们设计一个系统来控制它。
如果我有一个购物车和杆系统的模型,然后我可以使用类似的全状态反馈和调优技术等方面来设计一个控制器。但在这个例子中,我们假设我没有这个模型,产生一个可靠的和精确的模型将是困难的。这是一个与系统使用经验的情况下,基于逻辑的模糊控制器可以是有益的。所以,让我们走过这将是如何工作的。
这个离开屏幕是一个MATLAB生活脚本,我设计的模糊推理系统,一旦创建,我将把它在仿真软件对其进行测试。金宝app所以,开始我将创建一个mamdani mamfis函数模糊推理对象。我需要指定输入和输出的数量和隶属度函数的数量。现在,最终我们可能会想使用所有4输入,极角和角速度,车的位置和速度。然而,我想开始真的仅仅只是看到如果我们可以使用只是平衡极极角。直观地说,是有道理的,如果北极倾斜到一边你应该能够购物车在同一方向移动,和下杆,把它备份。的想法。
所以,在这种情况下只有一个输入。让一切都很简单,我也会只定义两个隶属度函数。
输入是极角,θ,这个输入的范围是-π-π弧度。然而,尽管输入可以在这个范围内的任何地方,我要建立这个系统只是尽量保持夹角+和- 0.5弧度。
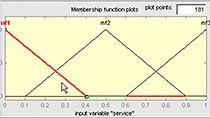
我要做的是与输入隶属函数的形状。我选择z -隶属函数的形状,因为它浸透在100%以下会员这个指定的下界是负5弧度在这种情况下,然后顺利斜坡下降到0%会员0.5弧度。积极的隶属函数,我使用一个年代的形状。
你知道,我会情节在这里所以你有个主意的样子。
你可以看到外面的饱和发生+(- 0.5弧度,如果我放大,可以看到两个隶属函数重叠在我关心的范围。我们可以阅读的方式是如果θ= 0,或者极完美的平衡,那么这个值同样属于消极的和积极的隶属度函数。否则,会员是倾斜的程度更多消极的或积极的根据θ。
如果我刚定义这些+(- 0.5弧度之间的隶属度函数,那么这个控制器不产生一个响应如果北极发生超出范围。但通过定义的函数在整个输入范围+ -π,我们保证控制器仍将标签输入完全消极或积极。
我将定义输出以类似的方式,但这一次我将定义隶属函数的形状作为广义贝尔函数。我不需要这些函数饱和,扩展到一些未知和任意大的值,因为我知道这个驱动器的力量。也,我知道多大的力我想申请车,所以我将这些钟的形状,大约12范围内牛顿在任何方向。
我将称之为纳米负介质,和点积极的媒介。这些媒介我打电话的原因是,提示,之后我将添加较大和较小的隶属度函数来输出,我想保持名称一致。但是现在,我们只有这两种可能的会员。
θ可以是积极的还是消极的,由此产生的力量可以是积极的媒介或消极的媒介。现在我们可以定义推理规则。与这样一个简单的系统,我们只需要两个规则!如果θ是负的,那么力是负介质,然后如果θ是正力是积极的媒介。这些规则基本上编码我们早先的直觉,这是极平衡我们需要移动车的方向倾斜。
记住,这是一种经验和直觉你可能只是想平衡自己,没有必要为一个数学模型这种推理。
好的,所以一旦我们这些规则添加到我们的模糊推理系统完成了设计,我们可以将它与一个模糊逻辑控制器块模型。金宝app控制器的输出是车力,我可以将它添加到脉冲干扰和反馈变量θ。就是这样,我们有一个输入和一个输出,我们准备运行它。
哦,看看它去吧!绝对保持杆直立但是做一种摆动舞蹈极下的车一直试图去但极造成过度的势头和马车回来,造成另一个过度,广告naseum。
我们可以再次回到我们的直觉和经验的问题,意识到如果我们不仅仅考虑杆角速度和角度我们可以用它来帮助减缓杆旋转达到一个平衡点。
所以,我要住在脚本更改输入的数量2,和添加第二个输入为θ点。我将保持相同的隶属函数的形状,但改变输入范围+和- 5 rad / s占快速旋转。
现在为输出,我认为我想要真正的角速度限制领先通过使用一个大部队只要运动。我不希望极点旋转太快,所以我要做的就是将两个隶属函数添加到输出,让他们集中在一个更大的力量。我会叫他们负大和积极的大。这是这些成员函数是什么样子。媒介一样,只是移动了一点。
现在我可以添加两个规则推理系统。如果θ点是负的,那么力是负的。如果北极是负方向旋转,真的试图阻止移动旋转的车有一个很大的消极力量。相反,积极θ点。
我想让你知道,我的方式建立这些规则,每个规则都有一个输入不是典型的模糊推理系统。我只是这样做,因为我觉得帮助告诉这个故事的每个输入如何导致整个控制器。通常,您希望设置这个,每个规则包含所有的输入和叉在一起。例如,在这种情况下,我仍有四个规则,但他们看起来像下面的。以这种方式设置规则实际上给你更多的灵活性在设计比我做的视频。然而,为简单起见,清晰我们要坚持这些规则,每个规则只有一个输入。
好,让我们来试一试这个版本的控制器。这两个输入一起所以我需要muxθ,θ点并送他们到模糊逻辑控制器。否则,其他的都是完全相同的。现在,让我们来运行这个模型。
哦,看!极完美的平衡。坚如磐石的自车正在迅速阻止任何可能的杆运动。这看起来好…好除了有轻微的购物车是徘徊试图平衡这杆。不会做的事。让我们使用购物车购物车位置和速度停止这种运动。
通过这一节我将邮政很快,因为它只是更多的相同。我添加两个新输入的两个z和s型隶属度函数。我要两个隶属函数添加到输出,消极的和积极的小。
如果我们观察输出函数的情节我们可以谈谈为什么我做这些更窄。我的想法是,由于车只是稍微走丢,我不想把它推的力,可能破坏的平衡。所以我认为只要稍稍推动它,我们就能保持极好平衡和购物车仍然能够保持稳定。
逻辑,我添加两个规则,购物车略在相反的方向移动的位置误差,然后保持车的速度低,我添加两个规则,尽量保持零速度与介质的力量。起初我为什么没有明显的动车远离零位置点,但这是我的推理。如果北极是完全平衡的,我想让车先离开旋转杆向目标位置。这将触发规则,试图保持直立杆通过移动的车更大的力量在相反的方向。这样,车最终我希望通过推动方向移动的其他方式。
与控制器准备好的,所以我们需要做一些更新模型。金宝app让我们给这个控制器的目标位置。我将改变信号发生器的块与振幅1输出一个方波。这是目标位置,将来回跳。然后我会减去测量位置产生位置误差也就是模糊逻辑控制器将试图开车到0。然后,我们必须添加位置误差和速度mux所有四个变量和输入到我们的模糊逻辑控制器。所以,让我们运行这个最终版本,看看它是如何。
酷,多么棒的呢?我的意思是有点慢,所以我可以花一些时间调整规则和隶属度函数,但是对于这个视频我认为这很好地显示了一个模糊推理系统的结果。我们表明,我们不需要推导的模型车/杆系统。我们可以开发这个控制器对系统的使用经验和我们的直觉如何控制它。
现在,我写代码设计模糊控制器,因为我认为它是容易跟随在视频格式,然而,所有这些代码可能被绕过,使用模糊逻辑设计图形的可以做设计师应用。应用程序,有一个点击放界面,你可以设计隶属函数和规则。加上它允许您可视化规则可以更容易诊断和调整控制器。
所以,如果你想开发一个模糊推理系统你可以选择你的喜好你喜欢用一个接口无论是图形还是写代码。
好了,最后,我想提醒你,模糊干扰系统有很多的实际应用和已经使用在许多不同的行业。我们已经知道,我们可以开发一个模糊逻辑控制器可以代替其他传统控制方法。
另一个例子是在自主驾驶一个模糊逻辑控制器已经被开发出来,它可以自动公园一辆汽车。这个系统使用范围传感器这四个方面来引导车进入空的位置。这是一个非常有趣的例子,因为汽车非完整约束。基本上这意味着有更多的自由度的汽车比有可能的方式来移动它。例如,汽车不能直接侧向移动,而是必须做出一系列的其他运动去那个方向。这是直观的驾驶员,因此可以成为一个伟大的模糊控制器基于逻辑的候选人。
另一个著名的例子是在日本仙台地铁系统速度控制器。使用模糊逻辑控制器,工程师们能够顺利启动和停止以及比人类更节能10%控制加速度。
然而,我们也谈到了在早期的视频模糊推理系统不仅可用于决策过程控制器。第二节我们讨论了贷款风险的例子和原来有许多实例的模糊推理决策系统在金融领域。
也有一些很有趣的例子在医疗行业。事实上,一个是使用模糊逻辑控制人工胰腺。研究表明,模糊逻辑是一种可行的替代其他基于模型的控制器闭环胰岛素的交付系统”,因为它不需要glucoregulatory系统的微分方程,并允许临床医生个性化剂量侵略性以满足个别患者需求。
这是一个很有趣的问题,我们要深入的一个版本一个人工胰腺下一节。在这个视频中,我们介绍了如何设计一个模糊推理系统的经验,但是在接下来的视频,使用人工胰腺的示例中,我们将展示如何设计一个系统,当你有大量的数据。
所以,如果你不想错过或任何其他未来科技视频说话,别忘了订阅这个通道。同样,如果你想看看我的通道,控制系统讲座我覆盖更多的控制理论主题。谢谢收看,下次再见。