zpk
Zero-pole-gain模型
描述
使用zpk创建零极增益模型,或者转换<一个href="//www.tatmou.com/de/de/help/control/ug/dynamic-system-models.html" class="a">动态系统模型变成零极增益形式。
零极增益模型是传递函数的因式表示。例如,考虑以下连续时间SISO传递函数:
G (s)可分解为零极增益形式为:
SISO零极增益模型的更一般的表示如下:
在这里,z而且p向量是实值的还是复值的零和极点K是实值标量增益还是复值标量增益
您可以通过直接指定极点、零点和增益,或者转换另一种类型的模型(例如状态空间模型)来创建零极点增益模型对象党卫军)到零极增益形式。
你也可以使用zpk要创建广义状态空间(<一个href="//www.tatmou.com/de/de/help/control/ref/genss.genss.html">一族)模型或不确定状态空间(<一个href="//www.tatmou.com/de/de/help/robust/ref/uss.html">号航空母舰(鲁棒控制工具箱))模型。
创建
语法
描述
sys= zpk (<一个href="//www.tatmou.com/de/help/control/ref/#mw_9f1caac8-65c0-4fc1-a63a-e342b85af967" class="intrnllnk">0,<一个href="//www.tatmou.com/de/help/control/ref/#mw_a5447907-5b5c-4abf-8a7a-6383648578fe" class="intrnllnk">波兰人,<一个href="//www.tatmou.com/de/help/control/ref/#mw_00524e18-a026-4fbc-a6fb-8d302655cae1" class="intrnllnk">获得)0而且波兰人的标量值获得.输出sys是一个zpk存储模型数据的模型对象。集0或波兰人来[]对于没有零和极点的系统。这两个输入不需要相等的长度,模型也不需要是合适的(也就是说,有过多的极点)。
sys= zpk (<一个href="//www.tatmou.com/de/help/control/ref/#mw_9f1caac8-65c0-4fc1-a63a-e342b85af967" class="intrnllnk">0,<一个href="//www.tatmou.com/de/help/control/ref/#mw_a5447907-5b5c-4abf-8a7a-6383648578fe" class="intrnllnk">波兰人,<一个href="//www.tatmou.com/de/help/control/ref/#mw_00524e18-a026-4fbc-a6fb-8d302655cae1" class="intrnllnk">获得,<一个href="//www.tatmou.com/de/help/control/ref/#mw_5c01b831-87b7-44e8-9b4d-0c8b92bf1f42" class="intrnllnk">ts)ts.集ts来-1或[]不指定采样时间。
sys= zpk (<一个href="//www.tatmou.com/de/help/control/ref/#mw_9f1caac8-65c0-4fc1-a63a-e342b85af967" class="intrnllnk">0,<一个href="//www.tatmou.com/de/help/control/ref/#mw_a5447907-5b5c-4abf-8a7a-6383648578fe" class="intrnllnk">波兰人,<一个href="//www.tatmou.com/de/help/control/ref/#mw_00524e18-a026-4fbc-a6fb-8d302655cae1" class="intrnllnk">获得,<一个href="//www.tatmou.com/de/help/control/ref/#mw_15036a11-8441-4968-8279-94aa619e7035" class="intrnllnk">ltiSys)ltiSys,包括采样时间。
sys= zpk (<一个href="//www.tatmou.com/de/help/control/ref/#mw_15036a11-8441-4968-8279-94aa619e7035" class="intrnllnk">ltiSys)ltiSys零极增益模型。
sys= zpk (<一个href="//www.tatmou.com/de/help/control/ref/#mw_15036a11-8441-4968-8279-94aa619e7035" class="intrnllnk">ltiSys,<一个href="//www.tatmou.com/de/help/control/ref/#mw_9c53a59c-df00-4f9c-b712-ee8b6c6ba699" class="intrnllnk">组件)组件的ltiSys到零极增益模型形式。仅在以下情况下使用此语法ltiSys是一个确定的线性时不变(LTI)模型,如中的难点或者一个idtf模型。
输入参数
输出参数
属性
对象的功能
下面的列表包含您可以使用的函数的一个代表性子集zpk模型。一般来说,任何函数都适用于<一个href="//www.tatmou.com/de/de/help/control/ug/dynamic-system-models.html" class="a">动态系统模型适用于zpk对象。
例子
连续时间SISO零极增益模型
对于本例,考虑以下连续时间SISO零极增益模型:
指定零点、极点和增益,并创建SISO零极点增益模型。
零= 0;极点= [1-1i 1+1i 2];增益= -2;Sys = zpk(零,极点,增益)
sys = 2年代 -------------------- ( 2) (s ^ 2 - 2 s + 2)连续时间零/钢管/增益模型。
离散SISO零极增益模型
对于本例,考虑以下采样时间为0.1s的SISO离散零极增益模型:
指定零点、极点、增益和采样时间,并创建离散SISO零极点增益模型。
零= [1 2 3];极点= [6 5 4];增益= 7;Ts = 0.1;Sys = zpk(零,极点,增益,ts)
sys = 7 (z二)(z-3 (z 1) ) ------------------- ( z-6) (z-5) (z-4)样品时间:0.1秒离散时间零/钢管/增益模型。
将SISO零极增益模型连接到MIMO零极增益模型
在本例中,您将通过连接SISO零极增益模型来创建一个MIMO零极增益模型。考虑以下单输入、双输出连续时间零极增益模型:
通过连接SISO项指定MIMO零极增益模型。
Zeros1 = 1;Poles1 = -1;增益= 1;Sys1 = zpk(zeros1,poles1,增益)
sys1 = (s-1) ----- (s+1)连续时间零/极/增益模型。
Zeros2 = -2;Poles2 = [-2+1i -2-1i];Sys2 = zpk(zeros2,poles2,增益)
sys2 = (s + 2 ) -------------- ( s ^ 2 + 4 + 5)连续时间零/钢管/增益模型。
Sys = [sys1;sys2]
sys =从输入到输出…(s - 1) 1:——(s + 1) (s + 2) 2 : -------------- ( s ^ 2 + 4 + 5)连续时间零/钢管/增益模型。
离散MIMO零极增益模型
为离散时间、多输入、多输出模型创建零极增益模型:
用采样时间Ts = 0.2秒。
将零点和极点指定为单元格数组,将增益指定为数组。
0 = {[] 0;2 []};极点= {-0.3 -0.3;-0.3 -0.3};增益= [1 1;-1 3];Ts = 0.2;
创建离散MIMO零极增益模型。
Sys = zpk(零,极点,增益,ts)
sys =从输入1到输出…1 : ------- ( z + 0.3) - (z二)2 : ------- ( z + 0.3)从输入2输出…z 1: ------- (z+0.3) 3 2: ------- (z+0.3)采样时间:0.2秒离散时间零/极/增益模型。
为零极增益模型指定输入名称
指定零点、极点和增益以及采样时间,并创建零极点增益模型,使用名称-值对指定状态和输入名称。
零= 4;极点= [-1+2i -1-2i];增益= 3;Ts = 0.05;Sys = zpk(零,极点,增益,ts,<年代p一个n年代tyle="color:#A020F0">“InputName”,<年代p一个n年代tyle="color:#A020F0">“力”)
sys =从输入“力”到输出:3 (z-4) -------------- (z^2 + 2z + 5)采样时间:0.05秒离散时间零/极/增益模型。
输入名称的个数必须与0的个数一致。
在处理MIMO系统的响应图时,命名输入和输出是有用的。
步骤(系统)

注意输入名称力在阶梯响应图的标题中。
基于有理表达式的连续时间零极增益模型
对于本例,使用有理表达式创建一个连续时间零极增益模型。使用有理表达式有时比指定极点和零点更容易和更直观。
考虑以下系统:
要创建传递函数模型,首先指定年代作为一个zpk对象。
S = zpk(<年代p一个n年代tyle="color:#A020F0">“年代”)
连续时间零/极/增益模型。
在有理表达式中使用s创建零极增益模型。
Sys = s/(s²+ 2*s + 10)
sys =年代 --------------- ( s ^ 2 + 2 + 10)连续时间零/钢管/增益模型。
基于有理表达式的离散零极增益模型
对于本例,使用有理表达式创建一个离散时间零极增益模型。使用有理表达式有时比指定极点和零点更容易和更直观。
考虑以下系统:
要创建零极增益模型,首先指定z作为一个zpk对象和采样时间ts.
Ts = 0.1;Z = zpk(<年代p一个n年代tyle="color:#A020F0">“z”ts)
采样时间:0.1秒离散时间零/极/增益模型。
使用创建零极增益模型z在理性表达中。
Sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys = (z 1 ) ------------------- ( z z ^ 2 - 1.85 + 0.9)样品时间:0.1秒离散时间零/钢管/增益模型。
具有遗传特性的零极点增益模型
对于本例,创建一个具有继承自另一个零极增益模型的属性的零极增益模型。考虑以下两个零极增益模型:
对于本例,创建sys1与TimeUnit而且InputDelay属性设置为'分钟”。
Zero1 = 0;Pole1 = [0;-8];Gain1 = 2;Sys1 = zpk(zero1,pole1,gain1,<年代p一个n年代tyle="color:#A020F0">“TimeUnit”,<年代p一个n年代tyle="color:#A020F0">“分钟”,<年代p一个n年代tyle="color:#A020F0">“InputUnit”,<年代p一个n年代tyle="color:#A020F0">“分钟”)
sys1 = 2 s ------- s (s+8)连续时间零/极/增益模型。
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 =<年代p一个nclass="emphasis">1 x2单元格{“分钟”}{“分钟”}
使用继承自的属性创建第二个零极增益模型sys1.
0 = 1;极点= [-3,5];Gain2 = 0.8;Sys2 = zpk(zero,pole,gain2,sys1)
sys2 = 0.8 (s - 1 ) ----------- ( s + 3) (s-5)连续时间零/钢管/增益模型。
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 =<年代p一个nclass="emphasis">1 x2单元格{“分钟”}{“分钟”}
观察零极增益模型sys2具有相同的性质sys1.
静态增益MIMO零极增益模型
考虑下面的双输入、双输出静态增益矩阵米:
指定增益矩阵并创建静态增益零极增益模型。
M = [2,4;<年代p一个n年代tyle="color:#0000FF">...3、5];Sys1 = zpk(m)
sys1 =从输入1到输出…1:2 2:3从输入2到输出…1:4 2:5静态增益。
可以使用静态增益零极增益模型sys1与另一个零极增益模型级联。
Sys2 = zpk(0,[-1 7],1)
sys2 =年代 ----------- ( s + 1) (s-7)连续时间零/钢管/增益模型。
Sys = series(sys1,sys2)
sys =从输入1到输出…2 s 1 : ----------- ( + 1) (s-7) 3年代2 : ----------- ( + 1) (s-7)从输入2输出…4 s 1 : ----------- ( + 1) (s-7) 5 s 2 : ----------- ( s + 1) (s-7)连续时间零/钢管/增益模型。
将状态空间模型转换为零极点增益模型
对于本例,计算以下状态空间模型的零极增益模型:
使用状态空间矩阵创建状态空间模型。
A = [-2 -1;1 -2];B = [1 1;2 -1];C = [10];D = [0 1];ltiSys = ss(A,B,C,D);
转换状态空间模型ltiSys零极增益模型。
sys = zpk(ltiSys)
sys =从输入1到输出:s -------------- (s^2 + 4s + 5)从输入2到输出:(s^2 + 5s + 8) -------------- (s^2 + 4s + 5)连续时间零/极/增益模型。
零极增益模型阵列
你可以使用为循环来指定零极增益模型的数组。
首先,用零预分配零极增益模型数组。
Sys = zpk(0 (1,1,3));
前两个索引表示模型的输出和输入的数量,而第三个索引是数组中模型的数量。
中的有理表达式创建零极增益模型数组为循环。
S = zpk(<年代p一个n年代tyle="color:#A020F0">“年代”);<年代p一个n年代tyle="color:#0000FF">为sys(:,:, K) = K /(s²+s+ K);<年代p一个n年代tyle="color:#0000FF">结束sys
sys (:: 1, - 1) = 1 ------------- ( s ^ 2 + s + 1)系统(:,:,2,1)= 2 ------------- ( s ^ 2 + s + 2)系统(:,:,3,1)= 3 ------------- ( s ^ 2 + s + 3) 3 x1的连续时间零/钢管/增益模型。
从已识别模型中提取零极增益模型
对于本例,将一个已识别的多项式模型的测量分量和噪声分量提取到两个独立的零极增益模型中。
加载Box-Jenkins多项式模型ltiSys在identifiedModel.mat.
负载(<年代p一个n年代tyle="color:#A020F0">“identifiedModel.mat”,<年代p一个n年代tyle="color:#A020F0">“ltiSys”);
ltiSys是一个已识别的离散时间模型,其形式为:<年代p一个nclass="inlineequation">
,在那里<年代p一个nclass="inlineequation">
表示测量的分量和<年代p一个nclass="inlineequation">
噪声成分。
将测量分量和噪声分量提取为零极增益模型。
sysMeas = zpk(ltiSys,<年代p一个n年代tyle="color:#A020F0">“测量”)
从输入“u1”输出sysMeas =“日元”:-0.14256 z ^ 1 (1 - 1.374 - z ^ 1) z ^ (2 ) * ----------------------------- ( 1 - 0.8789 - z ^ 1) (1 - 0.6958 - z ^ 1)样品时间:0.04秒离散时间零/钢管/增益模型。
sysNoise = zpk(ltiSys,<年代p一个n年代tyle="color:#A020F0">“噪音”)
结合sysNoise =从输入“v@y1”输出“日元”:0.045563 (1 + 0.7245 z ^ 1 ) -------------------------------------------- ( 1 - 0.9658 - z ^ 1) (1 - 0.0602 z ^ 1 + 0.2018 z ^ 2)输入组:名称通道噪声1样品时间:0.04秒离散时间零/钢管/增益模型。
测量分量可以作为一个设备模型,而噪声分量可以作为控制系统设计的扰动模型。
带输入输出延迟的零极增益模型
对于本例,创建一个输入延迟为0.5秒,输出延迟为2.5秒的SISO零极增益模型。
零= 5;极点= [7+1i 7-1i -3];增益= 1;Sys = zpk(零,极点,增益,<年代p一个n年代tyle="color:#A020F0">“InputDelay”, 0.5,<年代p一个n年代tyle="color:#A020F0">“OutputDelay”, 2.5)
sys = (s-5) exp (3 * ) * ---------------------- ( s + 3)(^ 2 - 14年代+ 50)连续时间零/钢管/增益模型。
你也可以使用得到命令显示MATLAB对象的所有属性。
(系统)
Z: {[5]} P: {[3x1 double]} K: 1 DisplayFormat: 'roots'变量:'s' IODelay: 0 InputDelay: 0.5000 OutputDelay: 2.5000 Ts: 0 TimeUnit: 'seconds' InputName: {"} InputUnit: {"} InputGroup: [1x1 struct] OutputName: {"} OutputUnit: {"} OutputGroup: [1x1 struct]备注:[0x1 string] UserData:[]名称:" SamplingGrid: [1x1 struct]
有关为LTI模型指定时间延迟的详细信息,请参见<一个href="//www.tatmou.com/de/de/help/control/ug/specifying-time-delays.html" class="a">指定延时时间.
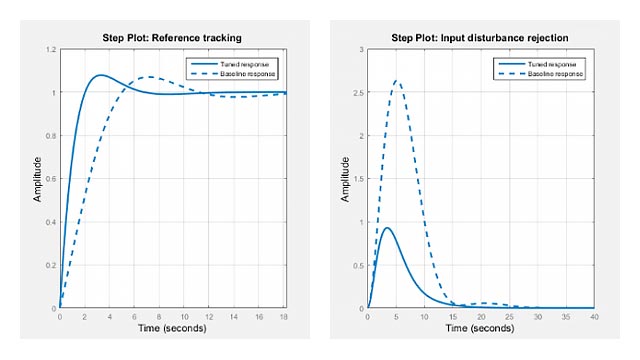
零极增益模型控制设计
在本例中,设计一个目标带宽为0.75 rad/s的2-DOF PID控制器,用于以下零极增益模型表示的系统:
创建一个零极增益模型对象sys使用zpk命令。
零= [];极点= [-0.25+0.2i;-0.25-0.2i];增益= 1;Sys = zpk(零,极点,增益)
sys = 1 --------------------- ( s ^ 2 + 0.5 + 0.1025)连续时间零/钢管/增益模型。
使用目标带宽,使用<一个href="//www.tatmou.com/de/de/help/control/ref/lti.pidtune.html" class="a">pidtune来生成一个二自由度控制器。
Wc = 0.75;C2 = pidtune(sys,<年代p一个n年代tyle="color:#A020F0">“PID2”wc)
C2 = 1 u = Kp (b*r-y) + Ki—(r-y) + Kd*s (c*r-y) s, Kp = 0.512, Ki = 0.0975, Kd = 0.574, b = 0.38, c = 0并联形式的连续时间2自由度PID控制器。
使用类型“PID2”原因pidtune生成2-DOF控制器,表示为pid2对象。显示屏证实了这一结果。显示屏也显示了这一点pidtune调优所有控制器系数,包括设定值权重b而且c,以平衡性能和健壮性。
有关实时编辑器中的交互式PID调优,请参阅<一个href="//www.tatmou.com/de/de/help/control/ref/tunepidcontroller.html" class="a">整定PID控制器实时编辑器任务。该任务允许您交互式地设计PID控制器,并自动为您的实时脚本生成MATLAB代码。
对于交互式PID调优在一个独立的应用程序,使用<一个href="//www.tatmou.com/de/de/help/control/ref/pidtuner-app.html" class="a">PID调谐器.看到<一个href="//www.tatmou.com/de/de/help/control/getstart/pid-controller-design-for-fast-reference-tracking.html" class="a">快速参考跟踪的PID控制器设计这是一个使用应用程序设计控制器的例子。
算法
zpk使用MATLAB函数根转换传递函数和函数零而且极转换状态空间模型。
另请参阅
filt|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">的朋友|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">得到|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">集|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">党卫军|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">zpkdata|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">一族|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">特遣部队|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">realp|<年代p一个n我te米年代cope itemtype="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">genmat
选择网站
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:<年代trong class="recommended-country">.
选择<年代p一个nclass="recommended-country">网站您也可以从以下列表中选择一个网站: