在这个视频中,我们将讨论定向控制,也称为船。我们将讨论为什么我们使用FOC和克拉克和公园变换实现一个船所需算法。
在前面的视频,我们讨论了如何刷马达工作和我们如何使用六步变换或梯形控制旋转它们。与这种类型的控制的一个缺点是我们观察的涟漪在电机的速度和转矩响应。这里,青色,品红向量向我们展示如何转子和定子磁场的大小和方向变化六无刷直流电机的换向。我们清楚地看到,定子和转子磁场波动之间的角60至120度。这背后的原因是速度和转矩波动。它还阻止我们得到最大扭矩,这发生在田野在90度一致。
我们克服缺点的六步变换与定向控制永磁同步电动机马达。这是另一个动画,向我们展示了由此产生的转子和定子磁场,当我们实现永磁同步电动机电动机磁场定向控制。你总是看到定子磁场方向保持正交于转子。定向控制大大减少了系统响应的涟漪,导致电机的平滑操作。它还允许电机运行速度高于额定速度使用一种称为磁场减弱的技术。这里要注意的一件事是,你得到这些好处的代价比六步变换实现更复杂的控制算法。因为现在而不是直流电流,你处理交流信号控制电机。
接下来,我们将讨论FOC算法是如何工作的。假设我们想要控制永磁同步电动机马达使用船。我们的目标是产生扭矩,也最大化这扭矩提高发动机性能。我们知道,当转子和定子字段完全一致时,不会产生转矩。随着夹角的增加,我们开始产生转矩,在90度的最大扭矩。那么,我们如何保持在90度,这些字段吗?我们需要知道的第一件事,或测量,是转子的位置。基于转子位置测量,我们确定所需的定子磁场定向矢量需要转子磁场正交。其余的算法对操纵三相电流以这样一种方式,他们的结果在这个期望的定子磁场向量。
我们将使用这个动画理解我们把定子磁场向量正交于转子磁场。洋红色向量向我们展示了定子磁场的向量空间表示。灰色向量是我们引用指向同一个方向作为转子磁场。我们希望红色向量领导参考90度。目前,紫红色的向量是前方45度的参考。所以,它主要由45度。我们看到在左边旋转坐标系。这就是时间序列上的相位超前的样子。这些周期性波形之间的相位差对应于45度。现在,这个红色的定子磁场向量导致转矩一代,但因为它不是对齐在90度的参考向量或转子磁场,我们比我们可以生产更小的转矩。 Here’s the trick to align these vectors orthogonally. We split the magenta vector into its components along these two axes. The one along the reference vector or rotor magnetic field is called the direct axis and often represented by the letter d. The other axis that makes 90 degrees with the direct axis is called quadrature axis and represented by the letter q. Here’s how we can break the magenta vector into its direct and quadrature axis components. Once we have these components, the rest of the algorithm is straightforward. We simply force the direct axis component to be zero while allowing the quadrature axis component to grow. Once the direct component diminishes completely, our stator field vector is at exactly 90 degrees with the reference vector. On the right, we see what this looks like in time-domain. Next, we’ll look at this animation to understand how the three-phase currents are changing to keep the stator field orthogonal to the rotor field. We’ll pause here and discuss what the different colored vectors represent. The red, green and blue vectors represent the phase A, B and C currents. The sum of these vectors gives us the stator field vector that is shown in magenta. As in the previous example, the gray vector is our reference which is in the same direction as the rotor field vector. We want the stator field vector to lead the reference by 90 degrees. To make this possible, as we discussed previously, we break the stator field vector into its direct and quadrature axis components and force the direct component to be zero. When we do this, we see how the quadrature component shown in yellow starts to grow. We also observe this on the time-series plot on the right. When it’s in complete quadrature with the reference, we achieve the 90 degrees between stator and rotor fields. On the plot, we see the resulting sinusoidal three-phase currents separated by 120 degrees.
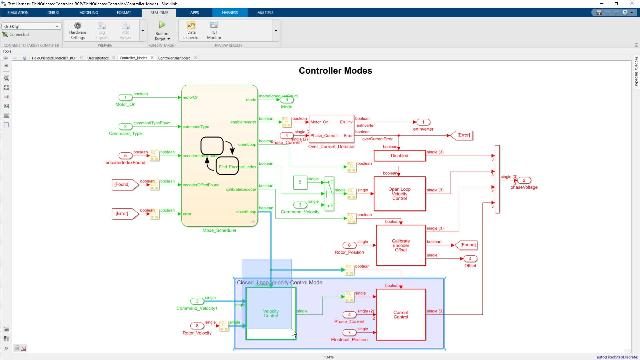
总而言之,我们显示如何电流矢量分解成它的直接和交轴组件。数学上,这个过程称为克拉克变换和公园。克拉克和公园变换的数学方程的这个视频的范围,但这是一个高度概括。在定向控制,我们感兴趣的是控制三相潮流能够控制电机的速度和转矩。而不是处理三相潮流,我们将其转换为直接和正交变换电流由克拉克和公园。为什么?因为在FOC我们处理交流电流正弦波形,我们会很难控制这些交流信号通过PID控制器。当我们使用克拉克和公园变换,这些翻译静止的定子坐标系到旋转参考系。换句话说,我们不需要处理交流电流了但只有直流信号,直接和正交电流。我们知道的是正交电流智商导致转矩一代,而不会产生任何扭矩直流Id。 So, to get the maximum torque we can use two PI-controllers: one to zero Id and the other one to maximize Iq. Let’s try to show these current control loops on a diagram. We first measure the three-phase currents and then apply the Clarke and Park transforms to convert the three-phase currents to the Iq and Id currents. Next, we compare these measured currents to the desired reference values and feed them to PI controllers, which then output the voltages vq and vd. Note that these voltages are represented in the rotating frame, which need to be converted to three-phase voltages before we send them to the motor. This means we need to do the inverse transforms to find the three-phase voltages.
让我们总结一下我们讨论。随着定向控制,我们可以创建一个定子磁场正交的转子磁场。通过这种方式,我们也最大化我们产生的扭矩和降低涟漪在电动机的转矩和速度响应。船利用克拉克和公园将三相交流电流转换成两个直流电流,然后分别由两个pi控制回路控制。
在克拉克的更多信息和公园转换以及FOC算法,别忘了查看这些页面。你可以找到这个视频下面的链接。下一次,我们将谈论的空间矢量脉宽调制。