本报告总结了主动铰接轮对腿漫游者的制导、导航和控制(GNC)软件的开发。火星模拟多模式穿越混合(MAMMOTH)四足机器人是一个85公斤重的机器人,能够改变足迹,爬过障碍物,重新配置姿态,以满足感知和穿越目标。由于该车辆GNC问题的复杂性,需要一种有效的软件开发技术。为了满足这一需求,基于模型的设计已经被用于在软件的可执行原型框架内快速开发和验证单个GNC算法。
讨论的主要软件组件包括执行器和传感器接口,用于独立控制11个自由度的运动控制器,各种定位和映射方案的融合,以及用于规划通过漫游者复杂配置空间的有效路径的运动规划器。
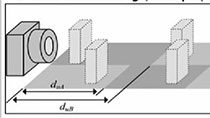
用于同步定位和绘图(SLAM)的RGB-D华硕Xtion传感器使用机器人操作系统(ROS)实现,并与机器人系统工具箱™接口。讨论了漫游者执行SLAM的各种遍历的结果。此外,还总结了将惯性测量单元数据、车轮里程计和激光测距仪数据融合到本地化方案中的方法。
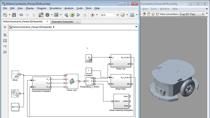
采用递归运动学传播方法建立了MAMMOTH探测车的运动学模型。该模型表达了独立驱动点和独立驱动点之间的关系。演示了漫游者在模拟和在火星模拟地形上驱动它的11个自由度。
最后讨论的主题是所使用的运动规划方案。利用Open Motion Planning Library (OMPL)和MATLAB中生成的运动学c++代码,生成可行高效的路径。运动规划在各种具有挑战性的模拟行星模拟环境中进行了演示。
MATLAB®和仿真软金宝app件®已被用于在软件在环、硬件在环和完全部署的开发环境中促进这些单独组件的集成和验证。本文总结了一个开发主动铰接悬架技术的示例工作流,以在漫游者穿越粗糙地形时保持恒定的身体姿态,以突出每个开发环境的使用情况。
由此产生的软件使新型行星漫游者探索平台的全部能力得以展示。给出了自主主动铰接悬架试验和自主挖掘任务的结果。这项工作的主要贡献是演示了一个复杂机器人系统的快速软件开发工作流。