来自Motionと视觉猛击的结构
ステレオビジョン,三重分享,3次元再构成,视觉同时定位和映射(vslam)
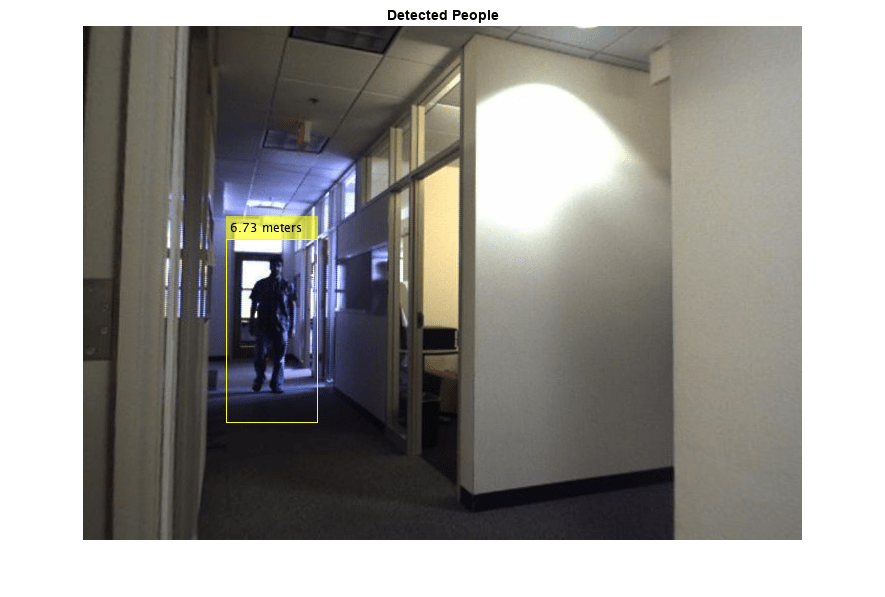
ステレオビジョンは,同じシーンの2つ以のビュービューを比较するによりイメージから深度を复元するですから深度をですです。结构从运动(sfm)は,一盏の2次元イメージから3次元シーンの构造推定推定するするです.Visual同步定位和映射(vslam)とは,环境のマッピングを行うと同同にとを计算はのです向き详细についての。Matlabでで视觉猛击のの装および来自Motionのの的结构を参照してください。
カテゴリ
- ステレオビジョン
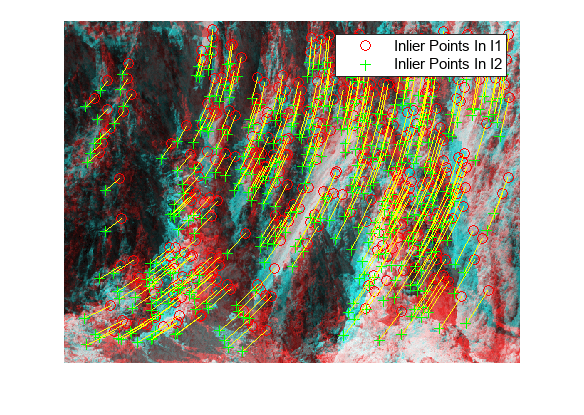
ステレオ平行,视差および高密度3次元再成 - 运动的结构
复数のビューからの3次元再构成 - 视觉同步定位和映射(vslam)
Visual Slamののマップののの,追迹,局局所,ループループ検,ドリフトドリフト正
注目の例




您还可以从以下列表中选择一个网站: