四轴飞行器项目
这个例子展示了如何使用Simulink®建模四轴飞行器,基于金宝appParrot®系列微型无人机。
为了管理模型和源文件,它使用项目管理.
为了在三维环境中展示四轴飞行器,它使用了Simulink 3D动画。金宝app
为协同开发飞行仿真应用程序,提供了飞行仿真应用程序模板的实现。
这个例子使用金宝app鹦鹉迷你金宝app无人机的Simulink支持包.
注意:要成功运行此示例,必须安装C/ c++编译器。
打开四轴飞行器项目
运行以下命令来创建并打开本例中项目文件的工作副本:
四轴飞行器物理特性
下面的原理图显示了四轴飞行器的物理特性:
轴
质量和惯性
转子

轴
四轴飞行器的身体轴以重心为中心。
的x轴从重心开始,沿着四轴飞行器的机头指向方向。
的y轴从重心开始,指向四轴飞行器的右侧。
的z轴从重心开始,从四轴飞行器向下,遵循右手规则。
质量和惯性
我们假设整个身体以粒子的形式工作。该文件劳动国包含了惯性和质量的值。
转子
转子#1相对于z设在。它位于平行于xy-plane, -45度x设在。
转子#2相对于阀体负向旋转z设在。它位于平行于xy-plane, -135°x设在。
3号转子与1号转子的转动方向相同。它位于平行于xy-plane, 135度x设在。
4号转子与2号转子的转动方向相同。它位于平行于xy-平面,45度x设在。
本例使用了Prouty[1]定义的方法,并适用于pond等人[2]的重型四轴飞行器。
控制
对于控制,四轴飞行器使用互补滤波器估计姿态,卡尔曼滤波器估计位置和速度。这个例子实现了:
用于俯仰/横摇控制的PID控制器
偏航PD控制器
一个PD控制器的位置控制在东北- down坐标
的controllerVars文件包含与控制器相关的变量。的estimatorVars文件包含与估计器相关的变量。
该示例将控制器和估计器实现为模型子系统,从而可以对几个估计器和控制器组合进行设计评估。
为四轴飞行器提供输入(在俯仰,滚转,偏航,北(X),东(Y),下(Z)坐标),使用下列之一并改变vss_command.工作区中的变量:
A Signal Editor块
操纵杆
之前保存的数据
电子表格数据
传感器
这个例子使用了一组传感器来确定它的状态:
惯性测量单元(IMU),用于测量角速率和平移加速度。
用于光流估计的摄像机。
用于测量高度的声纳。
示例将传感器的特征存储在文件中sensorVars.要在这些测量中包含传感器动态,您可以更改vss_sensors.变量。
环境
这些模型实现了几个Aerospace Blockset™环境模块,包括用于大气和重力模型的模块。要包含这些模型,您可以更改VSS_ENVIRONMENT变量,以在变量和固定的环境模型之间切换。
线性化
模型使用trimLinearizeOpPoint利用Simulink Control Design (R)将四轴飞行器的非线性模型线性化。金宝app
测试
为了确保轨迹生成工具能够正常工作,本实例在trajectoryTest文件。有关如何做到这一点的更多信息,请参阅Simulink控制设计金宝app开始使用Simulink控制设计金宝app(金宝app仿真软件控制设计)).
可视化
你可以通过以下方式来可视化四轴飞行器的变量:
使用仿真数据检查器。
使用飞行仪表块。
在不同的可视化不同的子系统之间切换。您可以在不同的子系统之间切换,通过更改
VSS_VISUALIZATION变量。注意,这些变体之一是FlightGear动画。要使用这个动画,你必须在项目中添加一个FlightGear兼容的四轴飞行器模型。软件不包括这个模型。
轨迹生成
使用Dubin方法的轨迹生成工具可以创建一组导航路径点。为了创建带有一组路径点的轨迹,该方法使用由位置、航向、转弯曲率和转弯方向定义的一组姿态。
要启动工具,请确保项目处于打开状态并运行:
界面显示如下:

该接口有几个面板:
路点
本面板描述了轨迹工具所需的姿势。要定义这些姿势,面板使用文本框:
北和东(在米)
标题(学位)
曲率(转弯曲率米^-1)
转(顺时针或逆时针方向)
姿态列表出现在文本框右侧的路径点列表中。
要添加路径点,请在编辑框中输入姿势值并单击添加.新的路径点出现在同一个面板的路径点列表中。
要编辑路径点的特征,请在列表中选择该路径点并单击编辑.路径点的特征显示在编辑框中。根据需要编辑特征,然后单击好吧.若要取消更改,请单击取消.
若要删除路径点,请在路径点列表中选择该路径点并单击删除.
禁飞区
该委员会确定了禁飞区的位置和特征。要定义禁飞区,面板使用文本框:
北和东(在米)
半径(米距离)
保证金(安全裕度以米为单位)
使用添加,删除,编辑,好吧,取消按钮的方式与路径点面板相同。
绘制轨迹
这个面板根据航路点和禁飞区特征绘制出苹果山校园上空的航迹示意图。
要生成轨迹,请将航点和无飞区域的特性添加到相应的面板,然后单击生成轨迹.
要保存当前在面板中的轨迹,请单击保存按钮。这个按钮只能保存你最后的轨迹。
要加载最后保存的轨迹,单击负载.
要加载默认轨迹,请按加载默认的按钮。
要清除航路点和禁飞区面板中的值,请单击清晰的.
默认数据包含特定位置的姿态,玩具四轴飞行器在那里使用它的摄像头,这样地面上的飞行员就可以估计屋顶上雪的高度。每个辅助发电机都有三个禁飞区,所以万一四轴飞行器出现故障,也不会对校园基础设施造成任何损害。
当示例生成默认数据的轨迹时,图应该如下所示:
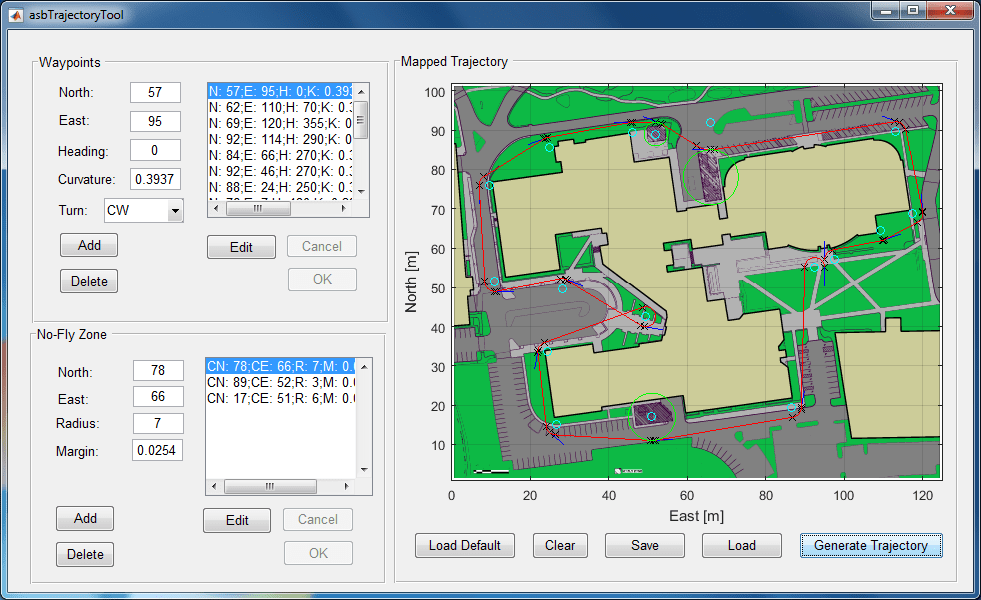
红线代表轨迹,黑色代表x标记物决定了轨迹的变化或特定的姿势。蓝线表示特定路径点的标题,伴随特定的姿态。禁飞区用绿色圆圈表示。
如果你有Simulink 3金宝appD动画许可证,你也可以查看Apple Hill校园的三维轨迹:

注意:由于可视化的原因,四轴飞行器的3D表示不与环境相同的比例。
参考
直升机性能,稳定性和控制。PWS出版社,2005年。
大型四旋翼机器人的建模与控制。控制工程实践。2010。
你也可以从以下列表中选择一个网站: