实时编辑器中的PID控制器设计
这个例子展示了如何使用调整PID控制器任务生成代码,用于为线性植物模型设计PID控制器。的调整PID控制器任务让您交互式地改进控制器的性能,以调整环路带宽和相位裕度,或有利于设置点跟踪或干扰。该任务生成响应图,使您在调整调优参数时可以监视控制器性能。
打开这个示例,可以看到一个包含调整PID控制器的任务。有关实时编辑器任务的详细信息,请参见向活动脚本添加交互式任务.
在实时编辑器中,为您的工厂创建一个LTI模型。
[-1 -2 -3 -4];
为该装置设计了PID控制器调整PID控制器住编辑任务。在住编辑器选项卡上,选择任务>调整PID控制器.此操作将任务插入到脚本中。

最初的控制器设计
为了生成一个初始的PID控制器设计,在植物菜单,选择您创建的植物,G.调整PID控制器自动生成PI控制器,平衡性能和鲁棒性,假设以下图的标准单位反馈控制配置。

该任务还生成一个步进响应图,显示来自的闭环步进响应r来y采用初始控制器设计。

改进控制器设计
选择系统响应特性显示此响应的某些时域特性的数值。

初始控制器设计的上升时间约为1.5秒,超调量约为8%。实验与响应时间和瞬态行为滑块来改变设计目标,并查看它们对阶跃响应的影响。
使用PI控制器和该装置,很难在不引入不稳定性或其他降低系统响应的情况下降低响应时间。尝试切换到PID控制器,看看是否可以获得更好的响应时间。在控制器类型下拉菜单,选择PID.

您现在可以减少控制器的响应时间。再次用滑块进行实验,观察对阶跃响应的影响。下面的例子更详细地展示了响应时间和瞬态行为滑块影响控制器性能,参见PID调节器有利于参考跟踪或干扰抑制(PID调节器).这个例子使用了PID调谐器应用程序而不是调整PID控制器任务,但滑块的行为和效果在这两种工具是相同的。
检查生成的代码
该任务自动生成代码以调整具有指定设计目标的工厂的PID控制器。要查看生成的代码,请单击 在任务的底部。任务展开以显示生成的代码。
在任务的底部。任务展开以显示生成的代码。

当您更改诸如控制器结构、性能目标和响应图类型等参数时,生成的代码将自动更新以反映新的设置。
检查抗扰性能
假设你感兴趣的是闭环系统对植物输入扰动的响应。来生成阶跃响应的图
来y,在输出图下拉菜单,选择步骤图:输入干扰抑制.情节更新以显示新的响应。根据更改响应图时设置性能目标的方式,您可能会看到如下响应。

您现在可以再次用控制器参数进行实验,观察它们对抗干扰的影响。有关详细说明如何使用滑块和其他设计参数来改善抗扰性能的示例,请参见PID调节器有利于参考跟踪或干扰抑制(PID调节器).这个例子使用了PID调谐器应用程序而不是调整PID控制器任务,但在这两种工具中,设计参数的行为和效果是相同的。
比较两种控制器设计
调整PID控制器将调谐控制器自动写入MATLAB®工作空间pid,pidstd,pid2,或pidstd2模型对象,以适合您的控制器设置的为准。任务使用在任务摘要行中指定的变量名存储控制器。默认情况下,变量名为C.当您更改控制器设置、性能目标或其他调优参数时,默认情况下任务将写入变量C.
您可以保存控制器设计,以便在进一步试验控制器类型、性能目标和其他设置时用作比较基线。为此,在任务摘要行中键入一个新的变量名。例如,将输出控制器名称更改为Cnew.

现在,当前的设计存储在MATLAB工作空间为C.对设计的任何进一步更改都存储为Cnew.
使用C作为比较的基线,在基线控制器菜单中,选择选择从工作区.然后,选择C在出现的菜单中。

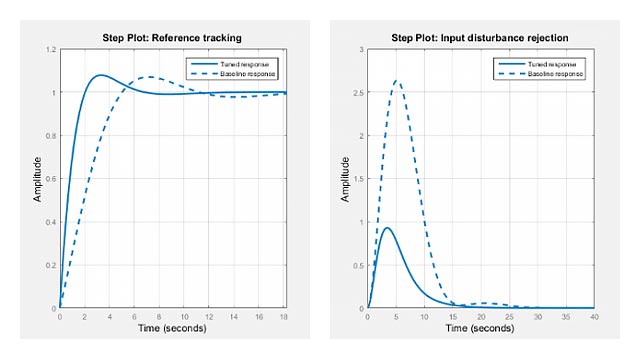
现在,当您进一步试验控制器设计时,图中显示了控制器的系统响应C(虚线)和控制器Cnew(实线)。

使用控制器
因为调整PID控制器task将控制器保存到MATLAB工作空间中,您可以像使用任何其他PID模型对象一样使用控制器进行控制设计和分析。例如,对一个略有不同的对象模型检查控制器性能,以获得闭环系统对参数变化的鲁棒性的感觉。
G1 = zpk(-5,[-0.75 -3 -4],8);CL1 = getPIDLoopResponse (C, G1,“闭环”);CL = getPIDLoopResponse (C、G、“闭环”);步骤(CL, CL1)

另请参阅
住编辑任务
相关的话题
你也可以从以下列表中选择一个网站: