驱动循环来源
标准或指定纵向驱动循环
库:
动力总成Blockset /车辆场景生成器
车辆动力学Blockset /车辆场景/驱动周期和演习
描述
的驱动循环来源块生成一个标准的或用户指定的纵向驱动循环。块输出指定的车辆纵向速度,您可以使用:
预测发动机扭矩和燃油消耗,汽车需要的方法来实现所需的速度和加速度对于一个给定的变速参考。
生产实际的速度和改变参考车辆控制和闭环加速和制动命令工厂模型。
研究、调整和优化车辆控制、系统性能和系统的鲁棒性在多个驱动周期。
识别标准化考试指定的公差内的错误,包括:
EPA测力计驾驶时间表1
协调全球轻型汽车测试程序(WLTP)实验室测试2
对于驱动周期,您可以使用:
驱动周期从预定义的来源。默认情况下,阻止了
ftp - 75驾驶循环。安装额外的驱动周期从一个支持包,看到的金宝app安装驱动周期的数据。支持包驱金宝app动周期,包括变速时间表,例如JC08和CUEDC。工作空间变量,定义自己的驱动周期。
。
垫,。xls,。xlsx,或。三种文件。大开油门(知道)参数,包括初始和名义参考速度、减速时间开始,最后参考速度。
实现目标表中列出,使用指定的驱动循环来源块参数选项。
| 目标 | 行动 |
|---|---|
重复的驱动周期如果模拟运行时间超过驱动周期的长度。 |
选择重复周期。 |
输出加速度,计算了Savitzky-Golay分化。 |
选择输出加速度。 |
指定一个样本期离散应用程序。 |
指定一个输出样例(0连续),dt参数。 |
更新仿真运行时,它等于驱动周期的长度。 |
点击更新仿真时间。存在,如果一个模型配置参考块不启用该选项。 |
在MATLAB情节驱动周期®图。 |
点击情节驱动周期。 |
使用工作空间变量指定驱动周期。 |
点击指定变量。块:
指定工作空间变量,它包含时间,速度,可选地,变速的时间表。有关示例,请参见使用工作空间变量创建驱动周期。 |
使用一个文件指定驱动周期。 |
点击选择文件。块:
指定一个文件,其中包含时间、速度,并可选地,变速的时间表。 |
输出驱动循环装置。 |
指定一个包含一个变速驱动周期时间表。您可以使用:
点击输出齿轮变化数据。 |
安装其他驱动周期从一个支持包。金宝app |
点击安装其他驱动周期。块使参数如果您可以安装额外的驱动周期从一个支持包。金宝app |
识别驱动周期的缺点在规定公差标准化测试。 |
在故障追踪选项卡,使用参数来指定错误公差。如果车速不容许速度范围内块设置故障状态。 |
故障和故障跟踪
在故障追踪选项卡,使用参数来指定错误公差。如果车辆速度或时间不是在容许范围内,设置一个块故障状态。
| 参数 | 描述 | 设置 | |
|---|---|---|---|
EPA标准1 |
WLTP测试2 |
||
速度宽容 |
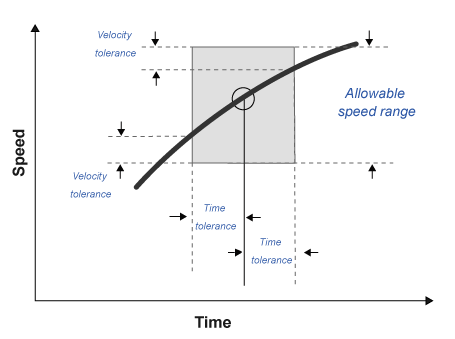
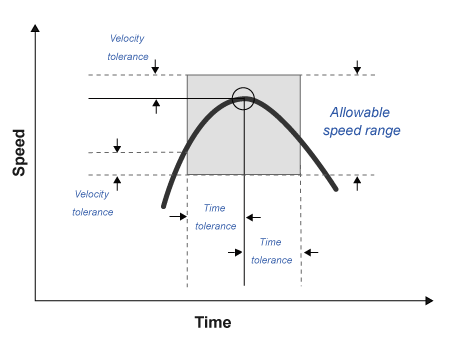
速度容忍度高于最高点和最低点以下驱动周期的速度跟踪的时间内宽容。 |
2.0英里 |
2.0公里/小时 |
时间的宽容 |
时间块用来确定速度宽容。 |
1.0秒 |
1.0秒 |
| 最大数量的错误 | 最大数量的缺点在驾驶周期。 |
未指定 | 10 |
| 最大单一故障时间 | 最大的故障持续时间。 |
2.0秒 | 1.0秒 |
| 最大总故障时间 | 在故障条件下最大积累时间。 |
未指定 | 未指定 |
这些数字说明了块使用速度和时间公差确定许用转速范围。
|
|
|
使用工作空间变量创建驱动周期
如果你设置驱动循环来源来工作空间变量,您可以指定一个工作空间变量,定义了驱动循环。
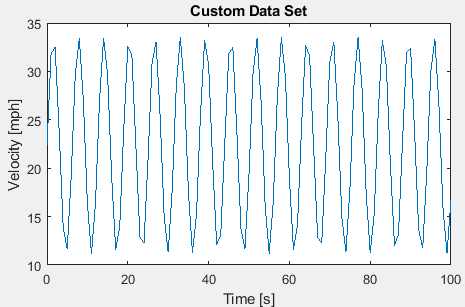
这个表提供了示例使用工作空间变量创建自己的驱动周期。
| 工作空间变量 | 源速度单位 | 输出速度单位 | 驱动循环图 |
|---|---|---|---|
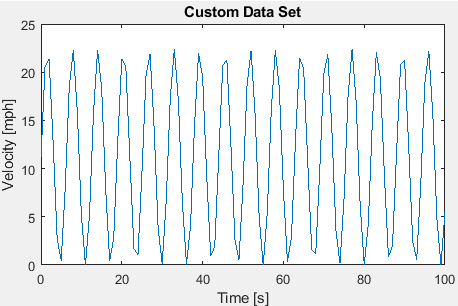
结构没有变速的安排。从工作空间设置为 t = 0:1:100;xdot = 5。* sin (t) + 10;myCycleS。时间= t ';myCycleS.signals。值= xdot '; |
米/秒 |
英里每小时 |
|
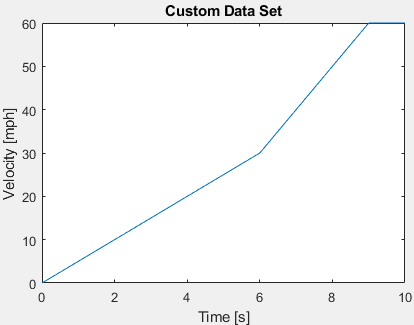
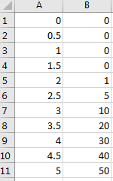
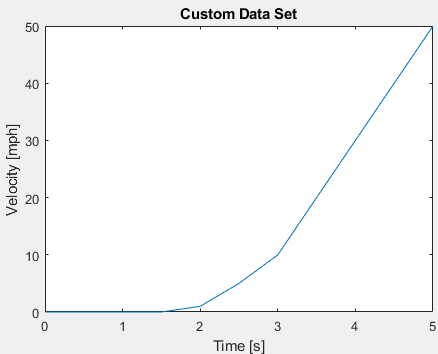
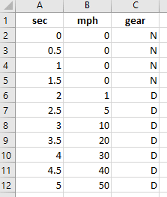
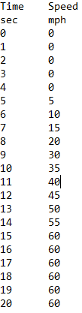
结构与变速的时间表。从工作空间设置为 齿轮= [0、1、2、3、3、4、4、4、4、4、4];t = 0:1:10;xdot = [0、5、10、15、20、25、30、30、30、30、30);myCycleS.time = t ';myCycleS.signals.values = [xdot”、齿轮”); |
米/秒 |
英里每小时 |
|
二维数组没有变速的安排。从工作空间设置为 t = 0:1:100;xdot = 5。* sin (t) + 5;myCycleA = (t, xdot”); |
米/秒 |
英里每小时 |
|
二维数组与变速的时间表。从工作空间设置为 齿轮= [0,1、2、3、4、4、4、5、5、5、5];t = 0:1:10;xdot =[0、5、10、15、20、25、30、40、50岁,60岁,60岁);myCycleA = [t, xdot齿轮'); |
英里每小时 |
英里每小时 |
|
时间序列对象没有变速的安排。从工作空间设置为 myCycleT = timeseries;t = 0:1:100;xdot = 5。* sin (t) + 20;myCycleT。Data = xdot'; myCycleT.Time = t; |
米/秒 |
英里每小时 |
|
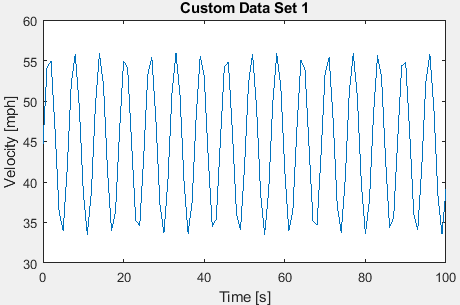
时间序列对象没有变速的安排。从工作空间设置为 myCycleT = timeseries;齿轮= [0,1、2、3、4、4、4、5、5、5、5];t = 0:1:10;xdot =[0, 10、20、30、32、33、34岁,40岁,50岁,60岁,60岁);myCycleT。Data = [xdot',gears']; myCycleT.Time = t'; |
英里每小时 |
英里每小时 |
|
港口
输入
输出
参数
周期设置
设置驱动循环来源- - - - - -选择驱动周期的来源
FTP75(默认)|大开油门(知道)|工作空间变量|.mat、xls、.xlsx或. txt文件
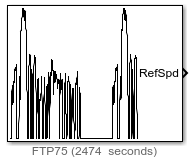
FTP75——加载FTP75驱动周期的。垫文件到一个一维查找表块。FTP75代表一个城市驾驶循环,您可以使用它们来确定轿车的尾气排放和燃油经济性。安装额外的驱动周期从一个支持包,看到的金宝app安装驱动周期的数据。大开油门(知道)——使用知道参数指定一个驱动循环性能测试。工作空间变量——指定时间,速度,可选地,齿轮数据结构,二维数组,或时间序列对象。.mat、xls、.xlsx或. txt文件——指定一个文件,其中包含时间、速度和,可选地,齿轮列格式的数据。
一旦你已经安装了额外的周期,你可以使用set_param设置驱动循环。例如,使用驱动循环US06:
set_param ([gc“源/驱动周期”),“cycleVar”,“US06”)
依赖关系
表总结了参数依赖关系。
| 驱动循环来源 | 使参数 |
|---|---|
大开油门(知道) |
开始时间,t_wot1 |
初始参考速度,xdot_woto |
|
名义上的参考速度,xdot_wot1 |
|
时间开始减速,wot2 |
|
最后参考速度,xdot_wot2 |
|
知道仿真时间,t_wotend |
|
源速度单位 |
|
工作空间变量 |
从工作空间 |
源速度单位 |
|
输出齿轮变化数据,如果驱动周期包括变速时间表 |
|
|
驱动周期的源文件 |
| 源速度单位 | |
输出齿轮变化数据,如果驱动周期包括变速时间表 |
从工作空间- - - - - -工作空间
变量
单调递增的时间,速度,可选地,齿轮数据,指定由一个结构,二维数组,或时间序列对象。输入速度的单位源速度单位参数字段。
一个有效的时间点必须为每个相应的存在价值。你不能指定正,空,或南。
这个表提供了示例使用工作空间变量创建自己的驱动周期。
| 工作空间变量 | 源速度单位 | 输出速度单位 | 驱动循环图 |
|---|---|---|---|
结构没有变速的安排。从工作空间设置为 t = 0:1:100;xdot = 5。* sin (t) + 10;myCycleS。时间= t ';myCycleS.signals。值= xdot '; |
米/秒 |
英里每小时 |
|
结构与变速的时间表。从工作空间设置为 齿轮= [0、1、2、3、3、4、4、4、4、4、4];t = 0:1:10;xdot = [0、5、10、15、20、25、30、30、30、30、30);myCycleS.time = t ';myCycleS.signals.values = [xdot”、齿轮”); |
米/秒 |
英里每小时 |
|
二维数组没有变速的安排。从工作空间设置为 t = 0:1:100;xdot = 5。* sin (t) + 5;myCycleA = (t, xdot”); |
米/秒 |
英里每小时 |
|
二维数组与变速的时间表。从工作空间设置为 齿轮= [0,1、2、3、4、4、4、5、5、5、5];t = 0:1:10;xdot =[0、5、10、15、20、25、30、40、50岁,60岁,60岁);myCycleA = [t, xdot齿轮'); |
英里每小时 |
英里每小时 |
|
时间序列对象没有变速的安排。从工作空间设置为 myCycleT = timeseries;t = 0:1:100;xdot = 5。* sin (t) + 20;myCycleT。Data = xdot'; myCycleT.Time = t; |
米/秒 |
英里每小时 |
|
时间序列对象没有变速的安排。从工作空间设置为 myCycleT = timeseries;齿轮= [0,1、2、3、4、4、4、5、5、5、5];t = 0:1:10;xdot =[0, 10、20、30、32、33、34岁,40岁,50岁,60岁,60岁);myCycleT。Data = [xdot',gears']; myCycleT.Time = t'; |
英里每小时 |
英里每小时 |
|
依赖关系
要启用该参数,选择工作空间变量从驱动循环来源。
驱动周期的源文件- - - - - -文件名称
.mat、xls、.xlsx或. txt
文件包含单调递增一次,速度,可选地,齿轮在列或逗号分隔格式。块忽略了单位的文件。输入速度的单位源速度单位参数字段。
| 文件 | 源速度单位 | 输出速度单位 | 驱动循环图 |
|---|---|---|---|
一个。
|
英里每小时 |
英里每小时 |
|
一个。
|
英里每小时 |
英里每小时 |
|
一个。
|
英里每小时 |
英里每小时 |
|
如果您提供齿轮安排使用P,R,N,D,l,OD块地图整数的齿轮。
齿轮 |
整数 |
|---|---|
P |
|
R |
|
N |
|
l |
|
D |
|
OD |
下一个整数后最高指定装备。 |
例如,块转换齿轮时间表P P N L D 3 4 5 6 5 4 5 6 7 OD 7来80 80 0 1 2 3 4 5 6 5 4 5 6 7 8 7。
依赖关系
要启用该参数,选择.mat、xls、.xlsx或. txt文件从驱动循环来源。
重复周期- - - - - -重复开周期
从(默认)|在
重复驱动周期如果模拟运行时间超过驱动周期的长度。
输出加速度- - - - - -输出加速度
从(默认)
计算加速度,块实现Savitzky-Golay分化三试样点滤镜的使用一个二阶多项式。
依赖关系
创建输出加速度端口,选择输出加速度。选择输出加速度使输出加速度单位参数。
输出齿轮变化数据- - - - - -输出齿轮
从(默认)|在
依赖关系
指定一个包含一个变速驱动周期时间表。您可以使用:
支持金宝app包安装标准驱动周期,包括变速时间表,例如
JC08和CUEDC。工作空间变量。
。
垫,。xls,。xlsx,或。三种文件。
点击这个参数创建输入端口齿轮。
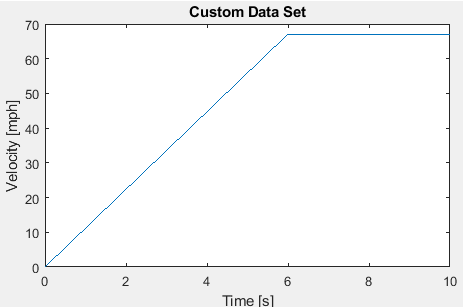
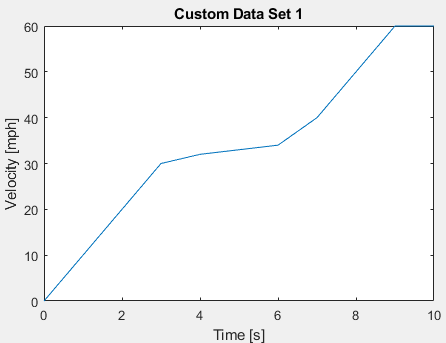
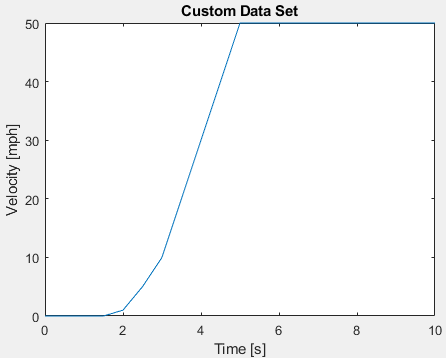
开始时间,t_wot1- - - - - -驱动周期的开始时间
5(默认)|标量
驱动周期开始时间,例如,在s。这张图显示了一个驱动周期的开始时间10年代。
依赖关系
要启用该参数,选择驱动循环来源参数大开油门(知道)。
初始参考速度,xdot_woto- - - - - -速度
0(默认)|标量
初始参考速度,在单位,你指定的源速度单位参数。例如,这个情节展示了一个周期的初始参考速度开车4m / s。
依赖关系
要启用该参数,选择驱动循环来源参数大开油门(知道)。
名义上的参考速度,xdot_wot1- - - - - -速度
30.(默认)|标量
名义上的参考速度,在单位,你指定的源速度单位参数。例如,这个情节显示驱动周期的名义基准速度30.m / s。
依赖关系
要启用该参数,选择驱动循环来源参数大开油门(知道)。
时间开始减速,wot2- - - - - -时间
20.(默认)|标量
时候开始车辆减速,例如,在s。这张图显示了与车辆减速驱动周期开始25年代。
依赖关系
要启用该参数,选择驱动循环来源参数大开油门(知道)。
最后参考速度,xdot_wot2- - - - - -速度
0(默认)|标量
最后参考速度,在单位,你指定的源速度单位参数。例如,这个情节显示驱动周期最后一个引用的速度2m / s。
依赖关系
要启用该参数,选择驱动循环来源参数大开油门(知道)。
知道仿真时间,t_wotend- - - - - -时间
30.(默认)|标量
驱动循环知道仿真时间,例如,在s。这张图显示了一个驱动周期的仿真时间50年代。
依赖关系
要启用该参数,选择驱动循环来源参数大开油门(知道)。
源速度单位- - - - - -指定的速度单位
米/秒(默认)
输入速度单位。
依赖关系
要启用该参数,选择驱动循环来源参数大开油门(知道),工作空间变量,或.mat、xls、.xlsx或. txt文件。
输出速度单位- - - - - -指定的速度单位
米/秒(默认)
输出速度单位。
输出加速度单位- - - - - -指定加速度单位
米/秒^ 2(默认)
指定输出加速度单位。
依赖关系
要启用该参数,选择输出加速度。
输出样例(0)连续时期- - - - - -采样率
0(默认)|标量
采样率。设置为0连续采样周期。对于离散时间,指定一个非零率。
故障追踪
错误的设置使故障跟踪- - - - - -使故障跟踪
从(默认)|在
选择要启用该参数驱动循环故障跟踪。使用参数来指定错误公差。如果车速不容许速度范围内块设置故障状态。
依赖关系
选择该参数使这些参数:
速度宽容,velBnd
速度公差单位,velBndUnit
速度反馈单元,inUnit
宽容,timeBnd
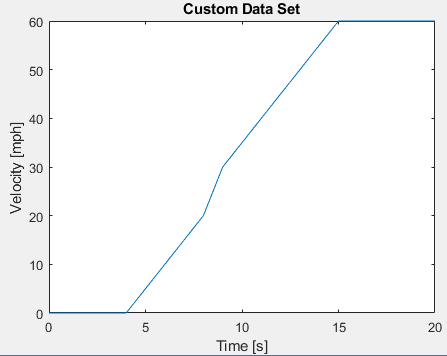
速度宽容,velBnd- - - - - -驱动循环速度宽容
2.0(默认)|标量
宽容速度高于最高点和最低点以下驱动周期的速度跟踪的时间内宽容。如果车速不容许速度范围内块设置故障状态。对于指定的公差标准测试,使用这些设置:
EPA测力计时间表——开车
2.0WLTP测试- - - - - -
2.0
这些数字说明了块使用速度和时间公差确定许用转速范围。
|
|
|
依赖关系
启用此参数,故障追踪选项卡上,选择使故障跟踪。
速度公差单位,velBndUnit- - - - - -设置单位
英里每小时(默认)
速度公差单位。对于指定的单位标准化测试,使用这些单位:
EPA测力计时间表——开车
米/秒WLTP测试- - - - - -
公里/小时
依赖关系
启用此参数,故障追踪选项卡上,选择使故障跟踪。
速度反馈单元,inUnit- - - - - -设置速度反馈单位
米/秒(默认)
速度反馈单元。将值设置为VelFdbk输入端信号单元。
依赖关系
启用此参数,故障追踪选项卡上,选择使故障跟踪。
宽容,timeBnd- - - - - -时间的宽容
1.0(默认)|标量
时间块用来确定速度宽容。如果车速不容许速度范围内块设置故障状态。标准化考试指定的公差,使用这些设置:
EPA测力计时间表——开车
1.0WLTP测试- - - - - -
1.0
这些数字说明了块使用速度和时间公差确定许用转速范围。
|
|
|
依赖关系
启用此参数,故障追踪选项卡上,选择使故障跟踪。
使故障跟踪- - - - - -使故障跟踪
从(默认)|在
选择要启用该参数驱动周期跟踪失败。
依赖关系
要启用该参数,选择使故障跟踪。选择使故障跟踪参数使这些参数:
停止仿真跟踪失败时,stopSim
最大数量的缺点,maxFaultCnt
最大的单一故障时间,maxFaultTime
最大总故障时间,maxTotFaultTime
最大数量的缺点,maxFaultCnt- - - - - -最大数量的错误
10(默认)|标量
最大数量的缺点在驾驶周期。指定数量的标准化测试,使用这些设置:
EPA测力计时间表——开车未指定
WLTP测试- - - - - -
10
如果错误的数量超过了最大数量的缺点,块设置错误失败。
依赖关系
启用此参数,故障追踪选项卡上,选择使故障跟踪。
最大的单一故障时间,maxFaultTime- - - - - -最大的单一故障持续时间
2.0(默认)|标量
最大的单一故障持续时间,在指定的时间。标准化的测试,使用这些设置:
EPA测力计时间表——开车
2.0WLTP测试- - - - - -
1.0
如果故障持续时间超过最大单一故障时间,块设置错误失败。
依赖关系
启用此参数,故障追踪选项卡上,选择使故障跟踪。
最大总故障时间,maxTotFaultTime- - - - - -最大总故障时间
15.0(默认)|标量
最大累积时间故障条件下,s。
如果故障条件下的累计时间超过最大总故障时间,块设置错误失败。
依赖关系
启用此参数,故障追踪选项卡上,选择使故障跟踪。
显示模拟跟踪- - - - - -显示速度跟踪
从(默认)|在
选择该参数显示速度跟踪窗口。选择该参数可以缓慢的仿真时间。
依赖关系
选择该参数使这些参数:
模拟跟踪更新率,dtTrace
模拟跟踪显示窗口,traceWindow
模拟跟踪更新率,dtTrace- - - - - -跟踪更新率
1(默认)|标量
模拟跟踪更新率,在年代。0连续采样周期。对于离散时间,指定一个非零率。
依赖关系
启用此参数,故障追踪选项卡上,选择显示模拟跟踪。
模拟跟踪显示窗口,traceWindow- - - - - -跟踪窗口更新率
10(默认)|标量
模拟跟踪窗口更新率,在年代。
依赖关系
启用此参数,故障追踪选项卡上,选择显示模拟跟踪。
引用
[1]环境保护署(EPA)。EPA城市测力计驾驶时间表。40 CFR 86.115 -78年,2001年7月1日。
欧盟委员会[2]。“速度跟踪公差”。欧盟委员会监管。32017 r1151, Sec 1.2.6.6, 2017年6月1日。
扩展功能
版本历史
介绍了R2017a