trackerPHD
描述
的trackerPHD系统对象™是一个跟踪器能够处理来自多个传感器的多个目标的检测。跟踪器使用多目标概率假设密度(博士)滤波器来估计状态的点目标和扩展对象。博士是一个函数定义的状态跟踪系统,和它的价值在一个状态被定义为预期的目标状态空间体积单位的数量。博士学位由加权求和(混合物)的概率密度函数,和峰博士对应于可能的目标。如何追踪功能的概述,请参阅算法。
默认情况下,trackerPHD可以跟踪扩展对象使用吗ggiwphd过滤器,它从一个扩展模型检测的对象作为解析点云。您还可以使用trackerPHD与gmphd过滤器,跟踪点目标和扩展对象与指定的形状。输入生成的跟踪检测报告objectDetection,fusionRadarSensor,irSensor,或sonarSensor对象。跟踪输出所有保持跟踪和分析信息。
使用这个对象跟踪目标:
创建
trackerPHD对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?
创建
描述
跟踪器= trackerPHDtrackerPHD系统对象的默认属性值。
跟踪器= trackerPHD (名称,值)trackerPHD (' MaxNumTracks ', 100)创建一个博士跟踪器,允许最多100张光碟。在报价附上每个属性的名字。
属性
使用
过程检测和更新,电话追踪的论点,就好像它是一个函数(这里描述)。
语法
描述
confirmedTracks=跟踪器(检测,时间)检测在更新的时候,时间。确认跟踪纠正和预测更新时间。
confirmedTracks=跟踪器(检测,配置,时间)配置。使用这个语法的配置传感器随时间变化。要启用这种语法,设置HasSensorConfigurationsInput财产真正的。
(还返回一个试探性的歌曲列表,confirmedTracks,tentativeTracks,allTracks)=跟踪器(___)tentativeTracks所有歌曲的列表,allTracks。您可以使用该输出与任何以前的语法输入语法。
(还返回分析信息,confirmedTracks,tentativeTracks,allTracks,analysisInformation)=跟踪器(___)analysisInformation,它可以用于跟踪分析。您可以使用该输出与任何以前的语法输入语法。
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
使用trackerPHD跟踪两个对象
设置传感器配置,创建一个博士跟踪器,和饲料检测的跟踪。
%创建传感器配置。指定传感器和杂波密度%设置IsValidTime属性为true。配置= trackingSensorConfiguration (1);配置。ClutterDensity = 1e-7; configuration.IsValidTime = true;%跟踪创建一个博士学位。追踪= trackerPHD (“SensorConfigurations”、配置);%创建附近探测点(5;5。0]和[5;5 0]在t = 0时,和%更新追踪这些检测。检测=细胞(20日1);为我= 1:10检测{我}= objectDetection (0, (5; 5。0) + 0.2 * randn (3,1));结束为j = 11:20检测{j} = objectDetection (0, (5; 5。0) + 0.2 * randn (3,1));结束追踪(检测,0);
0.1秒后再次更新追踪通过假设目标以一个恒定的速度(1;2。0)单位每秒。
dT = 0.1;为i = 1:20检测{}。时间=检测{}。时间+ dT;检测我{}。米easurement = detections{i}.Measurement + [1;2;0]*dT;结束[confTracks, tentTracks allTracks] =追踪(检测,dT);
可视化检测和跟踪确认。
%获得测量数据检测。d =[检测{}):;测量= [d.Measurement];%提取位置确认跟踪使用getTrackPositions函数。%注意,我们使用默认的传感器配置% FilterInitializationFcn initcvggiwphd,它使用一个恒定的速度%模型并定义美国[x, vx; y; v; z; v)。positionSelector = [1 0 0 0 0 0; 0 0 1 0 0 0, 0 0 0 0 0 1);位置= getTrackPositions (confTracks positionSelector);图()图(测量(1:),测量(2:)“x”,“MarkerSize”5,“MarkerEdgeColor”,“b”);持有在;情节(职位(1,1),职位(1、2),“v”,“MarkerSize”5,“MarkerEdgeColor”,“r”);持有在;情节(职位(2,1),职位(2,2),“^”,“MarkerSize”5,“MarkerEdgeColor”,“r”);传奇(“检测”,“轨道1”,“轨道2”)包含(“x”)ylabel (“y”)
![]()
轨道车辆跟踪场景中使用trackerPHD
创建一个跟踪场景和指定它StopTime和UpdateRate属性。
场景= trackingScenario;场景。StopTime=Inf; scenario.UpdateRate = 0;
在场景中添加一个塔平台并指定它的维度。
塔=平台(场景中,“ClassID”3);塔。D我米ensions = struct(…“长度”10…“宽度”10…“高度”现年60岁的…“OriginOffset”30],[0 0);
添加一个汽车平台的场景。指定其维度和轨迹。
车=平台(场景中,“ClassID”2);的车。D我米ensions = struct(…“长度”,4.7,…“宽度”,1.8,…“高度”,1.4,…“OriginOffset”(-0.6 0 0.7));的车。Trajectory = waypointTrajectory(…[0 -15 -0.23;0.3 -29.5 -0.23;0.3 -42 -0.39;0.3 -56.5 -0.23;…4.4 -0.3 -78.2 -0.23;-96.4 - -0.23),…[0;1.4;2.7;4.1;6.3;8.2),…“课程”,-88;-89;-89;-92;-84;-71年),…“水平”,(10;10;10;10;10;10),…“ClimbRate”,(0;0;0;0;0;0),…“AutoPitch”,真的,…“AutoBank”,真正的);
创建一个固定雷达,指定其属性,塔上的传感器。
NoScanning = fusionRadarSensor (“SensorIndex”,1…“UpdateRate”10…“MountingAngles”(-90 0 0),…“FieldOfView”20 [10],…“ScanMode”,“没有扫描”,…“之内”,真的,…“DetectionCoordinates”,“场景”,…“TargetReportFormat”,“检测”,…“HasElevation”,真正的);塔。传感器= NoScanning;
创建一个戏剧情节可视化传感器覆盖,跟踪和检测。
tp = theaterPlot (“XLim”,-58年[58],“YLim”,-104 (12)“ZLim”,-109年[8]);集(tp.Parent,“YDir”,“反向”,“ZDir”,“反向”);视图(tp.Parent, -37.5, 30);%平台绘图仪。platp = platformPlotter (tp,“DisplayName的”,“目标”,“MarkerFaceColor”,“k”);%检测传感器检测绘图仪。detp = detectionPlotter (tp,“DisplayName的”,“检测”,“MarkerSize”6…“MarkerFaceColor”(0.85 0.325 0.098),“MarkerEdgeColor”,“k”,“历史”,10000);%覆盖率绘图仪传感器。covp = coveragePlotter (tp,“DisplayName的”,传感器覆盖的);%为跟踪航迹绘图仪。tPlotter = trackPlotter (tp,“DisplayName的”,“跟踪”);
![]()
提取的传感器配置传感器和使用它来指定一个博士跟踪。
sensorConfig = trackingSensorConfiguration (scenario.Platforms {1} .Sensors {1},…“SensorTransformFcn”@cvmeas,“FilterInitializationFcn”,@initcvggiwphd);追踪= trackerPHD (“SensorConfigurations”sensorConfig,…“PartitioningFcn”@ (x) partitionDetections (4.7 x 1),…“AssignmentThreshold”,20岁,“ExtractionThreshold”,0.8,…“ConfirmationThreshold”,1.5,“MergingThreshold”,20岁,…“DeletionThreshold”2 e 1“出生率”1 e - 3,…“HasSensorConfigurationsInput”,真正的);
模拟场景中,生成检测,并使用检测跟踪汽车。在模拟更新戏剧情节。
而推进(场景)& & ishghandle (tp.Parent)%生成传感器数据。[引爆器,配置,sensorConfigPIDs] =检测(场景);%读取传感器数据。allDets =[侦破{}):;如果~ isempty (allDets)%提取测量的位置。量=猫(2,allDets.Measurement) ';%提取测量噪声。allDets.MeasurementNoise measCov =猫(3日);其他的量= 0 (0,3);measCov = 0 (3 3 0);结束%获得正确的位置。truePoses = platformPoses(场景);truePosition = vertcat (truePoses (:) .Position);%更新跟踪检测和传感器配置。[cTracks, tTracks allTracks] =追踪(引爆器,配置,scenario.SimulationTime);%更新戏剧情节。plotPlatform (platp truePosition);plotDetection (detp量、measCov);plotCoverage (covp coverageConfig(场景));%更新跟踪绘图机。提取跟踪位置。positionSelector = [1 0 0 0 0 0;0 0 1 0 0 0;0 0 0 0 0 1);位置= getTrackPositions (cTracks positionSelector);%标签和阴谋。如果~ isempty (cTracks)标签=电池(元素个数(cTracks), 1);为i = 1:元素个数(cTracks)标签{我}= {(“T”num2str (cTracks(我).TrackID)]};结束plotTrack (tPlotter,位置,标签);结束drawnow结束
![]()
更多关于
算法
概率假设密度
概率假设密度(博士)是一个函数定义的状态跟踪系统,和它的价值在一个状态被定义为预期的目标状态空间体积单位的数量。博士通常近似的组件,每个组件和对应于估计的状态。博士的常用近似高斯混合,SMC混合物,GGIW混合物,GIW混合物。
要理解博士,以高斯混合为一个例子。高斯混合可以用
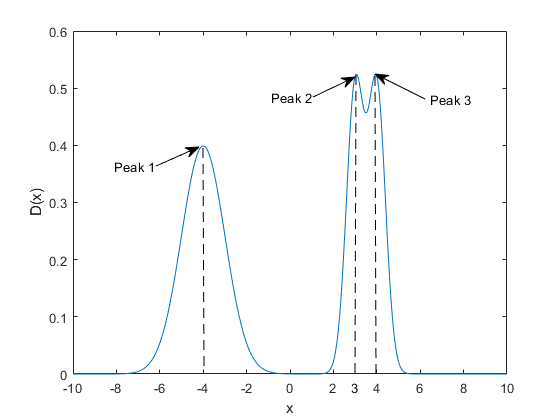
在哪里米组件的总数,N(x|米我,P我)是一个正态分布的意思米我和协方差P我,w我的重量吗我组件。重量w我表示数量,可分数所代表的目标我组件。集成的D(x)对非整数地区结果的预期目标。集成D(x)在整个状态空间结果的总预期目标(∑w我),因为一个正态分布的集成在整个状态空间是1。的x坐标的山峰(本地最大值)D(x)代表了最有可能的目标。
例如,下图展示了一个博士给出的函数D(x)=N(x|−4,2)+ 0.5N(x| 3、0.4)+ 0.5N(x| 4,0.4)。这些组件的重量总和是2,这意味着两个目标可能存在。的山峰D(x),这些目标的可能位置x=−4,x= 3,x= 4。注意最后两个组件是非常接近对方,这意味着这两个组件可能归因于一个对象。
引用
[1]Granstorm, K。,C。Lundquiest, and O. Orguner. " Extended target tracking using a Gaussian-mixture PHD filter."IEEE航空航天和电子系统。48卷,4号,2012年,页3268 - 3286。
[2]Granstorm, K。,O. Orguner." A PHD filter for tracking multiple extended targets using random matrices."IEEE信号处理。60卷,11号,2012年,页5657 - 5671。
[3]Granstorm, K。,A. Natale, P. Braca, G. Ludeno, and F. Serafino."Gamma Gaussian inverse Wishart probability hypothesis density for extended target tracking using X-band marine radar data."IEEE地球科学和遥感。53卷,12号,2015年,页6617 - 6631。
[4]附近潘塔,译注),et al . "数据关联和跟踪管理高斯混合概率假设密度滤光片。”IEEE航空航天和电子系统,45卷,不。3、2009年7月,页1003 - 16。
[5]Ristic B。,et al. “Adaptive Target Birth Intensity for PHD and CPHD Filters.”IEEE航空航天和电子系统,48卷,不。2,2012年,页1656 - 68。