轨迹对轨迹融合的介绍
跟踪到跟踪融合与中央一级跟踪
多传感器跟踪系统可以提供比单一传感器系统更好的性能,因为它可以提供更广泛的覆盖和更好的可见性。此外,融合不同类型传感器的检测也可以提高目标估计的质量和精度。在多传感器跟踪系统中通常使用两种结构。在第一种架构中——中央级跟踪——来自所有传感器的检测直接发送到基于所有检测的跟踪系统。从理论上讲,中心级跟踪体系结构可以获得最好的性能,因为它可以充分利用检测中包含的所有信息。但是,您也可以应用具有传感器级跟踪和多传感器系统的轨迹级融合的分层结构。图中给出了一个典型的中央级跟踪系统和一个典型的基于传感器级跟踪和航迹级融合的航迹-航迹融合系统。
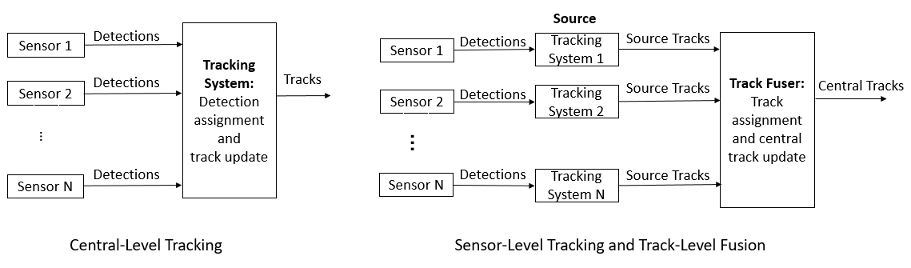
为了表示track-to-track融合系统中的每个元素,将向fuser输出轨迹的跟踪系统称为源,将源输出的轨迹称为源轨迹或局部轨迹。把在熔断器中维护的轨道称为中心轨道。
轨迹间融合的优点和挑战
在某些情况下,跟踪到跟踪的融合体系结构可能比中央级别的跟踪体系结构更可取。这些情况包括:
在许多应用中,跟踪系统不仅需要跟踪自身环境中的目标以实现自导航,还需要将其维护的轨迹转移到周围的跟踪系统,以提高整体导航性能。例如,跟踪自己的情景环境的自动驾驶车辆也可以与其他车辆共享维护的轨道,以方便它们的导航。
在实践中,许多传感器直接输出轨迹而不是检测。因此,为了整合传感器输出轨迹的信息,需要进行轨迹级融合。
当通信带宽有限时,发送一个跟踪列表通常比发送一组检测更有效。这对于以相对于扫描速率较低的速率提供跟踪列表的情况尤其重要。
当传感器和检测数量较大时,集中式跟踪系统的计算复杂度会很高,特别是在检测分配方面。航迹融合体系结构可以将一些分配和估计工作分配给传感器级的跟踪,降低了fuser的计算复杂度。
尽管track-to-track融合体系结构具有所有优势,但它也给跟踪系统带来了额外的复杂性和挑战。不同于可以假定是条件独立的检测,来自每个源的轨迹估计是相互关联的,因为它们有一个共同的预测错误,这是由一个共同的过程模型造成的。因此,使用标准滤波方法计算融合轨迹可能会导致不正确的结果。必须考虑以下影响:
常见的过程噪声-由于传感器观察和跟踪相同的目标,它们有一些共同的动力。因此,目标机动可能导致对所有传感器都通用的平均误差。
时间相关的测量噪声——如果航迹融合随着时间的推移而重复,那么标准的卡尔曼滤波假设(测量不随时间的推移而相关)就会被违反,因为传感器级的航迹状态估计误差是随时间的推移而相关的。
跟踪Fuser和跟踪架构
你可以使用trackFuser在传感器融合和跟踪工具箱™中,用于跟踪到跟踪的融合。的trackFuserSystem object™提供了两种结合源航迹的算法,考虑了不同航迹之间的校正效果。可以通过指定来选择算法StateFusion的属性trackFuser为:
“十字”—采用交叉协方差融合算法。“十字路口”—使用协方差交集融合算法。
您还可以自定义自己的融合算法。
除了上图中所示的标准track-to-track融合体系结构外,您还可以使用其他类型的体系结构trackFuser.例如,下图展示了一个两车跟踪系统。
在每辆车上,两个传感器通过相关的跟踪器跟踪附近的目标。每辆车都有一个熔断器,用来熔断来自两个跟踪器的源轨迹。Fuser 6可以将其维持的中央轨道传输给Fuser 3。利用这种架构,车辆1可以识别不在其自身传感器视野范围内的目标(图中的目标2)。
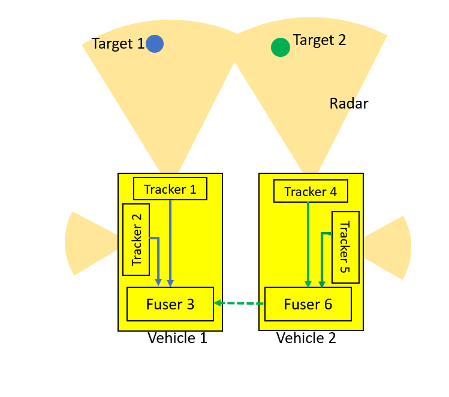
要减少谣言传播,可以将Fuser 6到Fuser 3的源轨迹视为外部路径IsInternalSource的属性fuserSourceConfiguration作为假在设置SourceConfigurations的属性TrackFuser.
由于不同跟踪器所报告的轨迹可以在不同的坐标框架中表示,因此您需要通过指定fuserSourceConfiguration财产。
另请参阅
trackFuser|fuserSourceConfiguration|trackerGNN|trackerJPDA|trackerTOMHT|trackerPHD
参考文献
[1] Chong, c.y, S. Mori, W. H. Barker, K. C. Chang。轨道关联和融合的体系结构和算法航空和电子系统杂志, Vol. 15, No. 1, 2000, pp. 5 - 13。
你也可以从以下列表中选择一个网站: