低光照条件下的图像增强
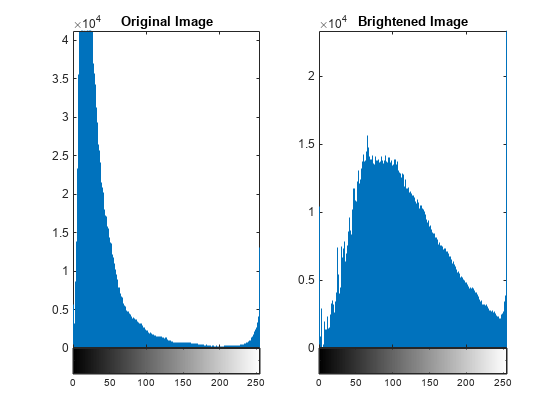
由于光照条件差,在室外拍摄的图像可能会严重退化。这些图像具有低动态范围和高噪声水平,影响计算机视觉算法的整体性能。为了使计算机视觉算法在弱光条件下具有鲁棒性,使用弱光图像增强来提高图像的可见性。弱光图像或HDR图像逐像素反演的直方图与模糊图像的直方图非常相似。因此,您可以使用雾霾去除技术来增强弱光图像。
使用去雾技术增强弱光图像包括三个步骤:
第一步:反转暗光图像。
步骤2:将去雾算法应用到倒微光图像上。
第三步:反转增强后的图像。
利用去雾算法增强微光图像
导入在弱光下捕获的RGB图像。
一个= imread (“lowlight_11.jpg”);imshow(一个);
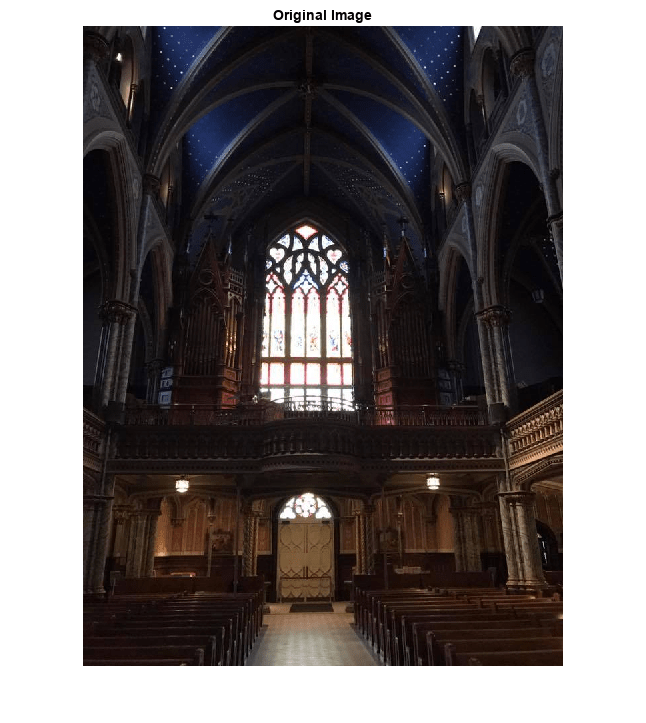
反转图像,注意原始图像中的弱光区域是如何显得模糊的。
AInv = imcomplement(一个);imshow (AInv);
减少雾霾使用imreducehaze函数。
BInv = imreducehaze (AInv);imshow (BInv);
对结果进行反变换,得到增强后的图像。
B = imcomplement (BInv);
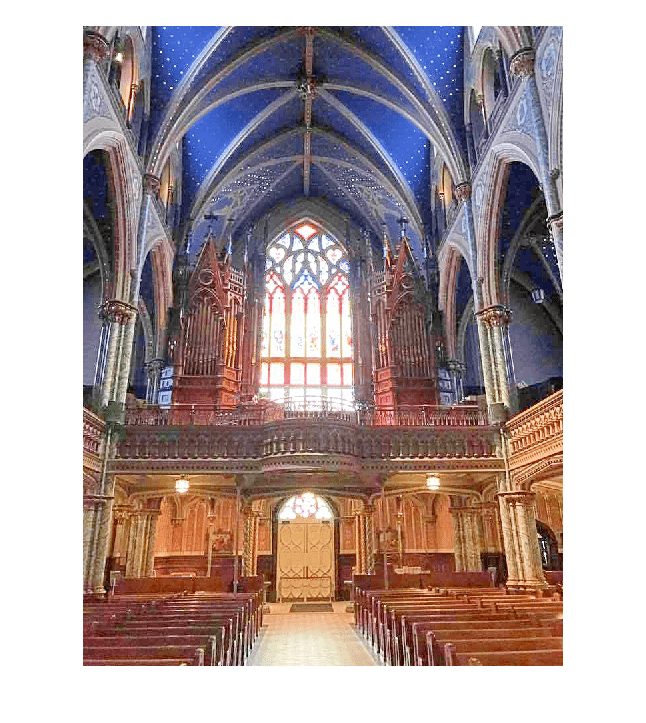
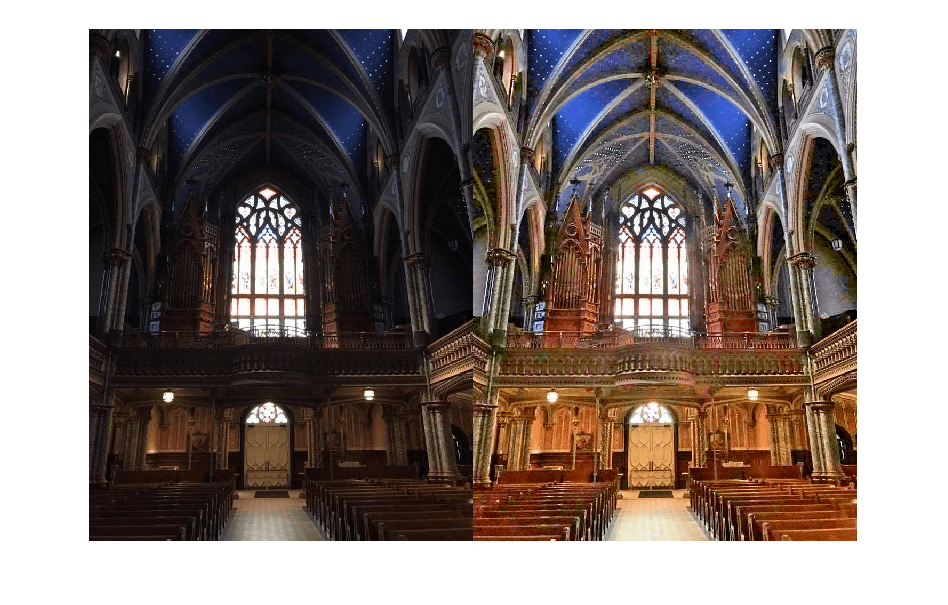
显示原始图像和增强图像,并排。
蒙太奇({B});
进一步使用imreducehaze可选参数
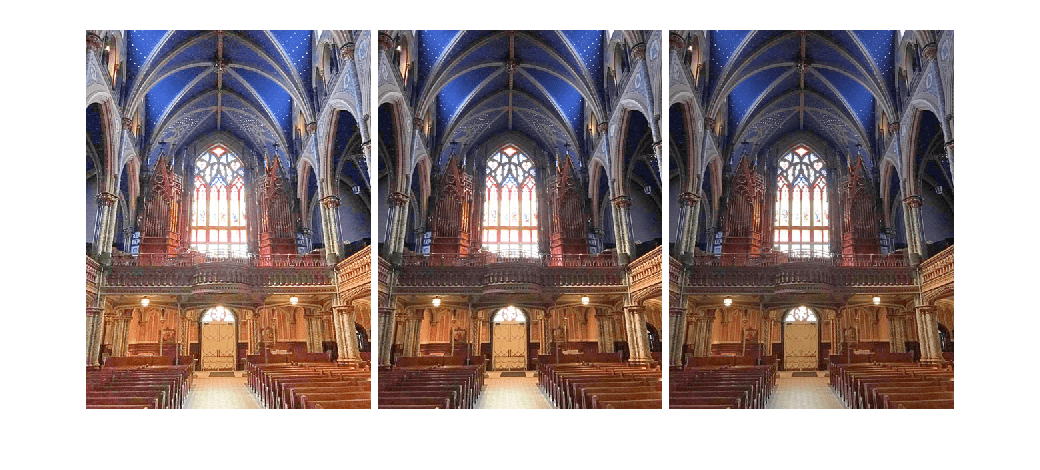
为了得到更好的结果,打电话imreducehaze对于倒立的图像,这次指定一些可选参数。
BInv = imreducehaze (AInv,“方法”,“大约”,“ContrastEnhancement”,“提升”);BImp = imcomplement (BInv);图中,蒙太奇({,BImp});
另一个改善光线差的图像的例子
导入在弱光下捕获的RGB图像。
一个= imread (“lowlight_21.jpg”);
反转的图像。
AInv = imcomplement(一个);
应用去雾算法。
BInv = imreducehaze (AInv,“ContrastEnhancement”,“没有”);
转化结果。
B = imcomplement (BInv);
显示原始图像和增强图像,并排。
蒙太奇({B});
通过使用不同的颜色空间来减少颜色失真
将输入图像从RGB颜色空间转换为L*a*b*颜色空间。
实验室= rgb2lab(一个);
反转L*a*b*图像。
LInv = imcomplement(Lab(:,:,1) ./ 100);
的反像去雾imreducehaze函数。
LEnh = imcomplement (imreducehaze (LInv“ContrastEnhancement”,“没有”));
增加饱和度。
LabEnh(:,:,1) = LEnh .* 100;LabEnh(:,:,2:3) = Lab(:,:,2:3) * 2;%增加饱和
将图像转换回RGB图像,并显示原来的和增强的图像,并排。
AEnh = lab2rgb (LabEnh);蒙太奇({AEnh});

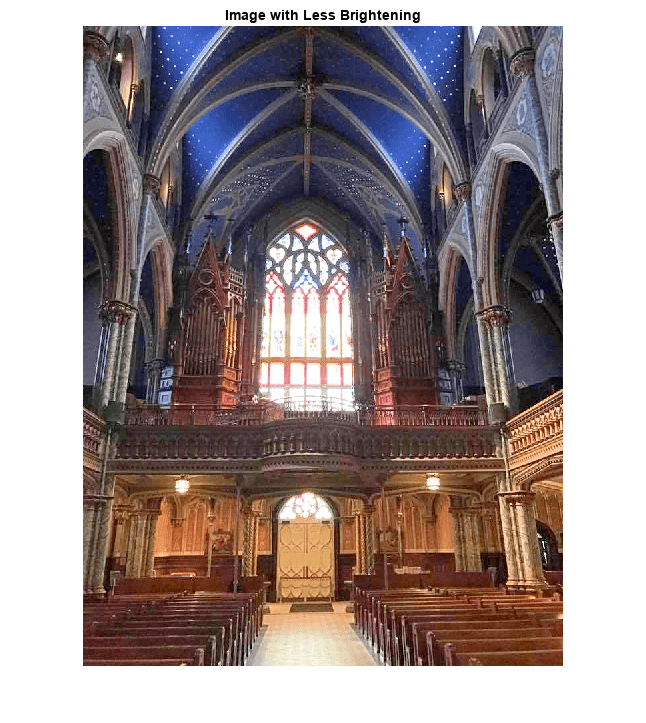
利用去噪改进结果
弱光图像可能有高噪声水平。增强弱光图像会增加这种噪声水平。去噪是一个有用的后处理步骤。
使用imguidedfilter函数去除增强图像中的噪声。
B = imguidedfilter (BImp);蒙太奇({BImp B});

估计照明地图
导入在弱光下捕获的RGB图像。
一个= imread (“lowlight_21.jpg”);
反转的图像。
AInv = imcomplement(一个);
对图像应用去雾算法。
[BInv, TInv] = imreducehaze (AInv,“方法”,“approxdcp”,“ContrastEnhancement”,“没有”);
反转增强后的图像。
T = imcomplement (TInv);
显示原始图像旁边的估计照明地图在假颜色。
(1,2) nexttile imshow(A) title(“低潮形象”) nexttile imshow(T) title(“照明地图”) colormap(热)

限制
这种方法由于对暗通道在弱光条件下的适应性差,可能会丢失一些细节或过度增强。
参考文献
董宣,等。“快速高效的微光视频增强算法”。多媒体与展览(ICME), 2011 IEEE国际会议。IEEE 2011。
参考文献
董旭,王刚,庞勇,李伟,文杰,W.孟,卢勇。“快速高效的微光视频增强算法”。IEEE学报》®国际多媒体及展览会(ICME).2011年,页1 - 6。
另请参阅
你也可以从以下列表中选择一个网站:
