主要内容
边缘
在强度图像中查找边缘
语法
描述
例子
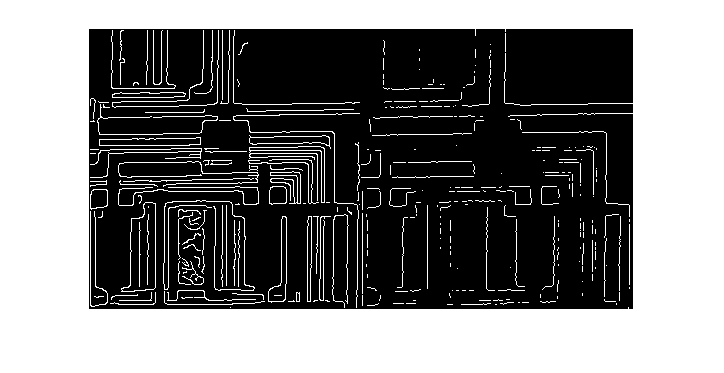
比较Canny和Prewitt方法的边缘检测
将灰度图像读入工作区并显示它。
我= imread (“circuit.tif”);imshow(我)
使用Canny方法查找边。
BW1 =边缘(我“精明”);
使用Prewitt方法找到边。
BW2 =边缘(我“普瑞维特”);
并排显示两个结果。
imshowpair (BW1 BW2,“蒙太奇”)
输入参数
输出参数
算法
对于梯度幅度边缘检测方法(Sobel, Prewitt和Roberts),
边缘使用门槛设置计算的梯度幅值的阈值。对于零交法,包括高斯拉普拉斯法,
边缘使用门槛作为零交叉点的阈值。换句话说,跨越零的大跳跃是一条边,而小跳跃不是。Canny方法对梯度采用两个阈值:高阈值代表低边缘灵敏度,低阈值代表高边缘灵敏度。
边缘从低灵敏度结果开始,然后将其增长到包括高灵敏度结果的连接边缘像素。这有助于填补检测边缘的空白。在所有情况下,
边缘启发式地选择默认阈值,这取决于输入数据。改变阈值的最好方法是运行边缘第一次,捕获计算的阈值作为第二个输出参数。然后,从计算得到的值开始边缘,调高阈值以检测更少的边缘像素,或调低阈值以检测更多的边缘像素。
兼容性的考虑
工具书类
[1] 约翰·坎尼,“边缘检测的计算方法,”IEEE模式分析与机器智能汇刊,PAMI-8卷,第6期,1986,679-698页。
[2] Lim, Jae S,二维信号和图像处理, Englewood Cliffs, NJ, Prentice Hall, 1990, 478-488页。
詹姆斯·R·帕克图像处理和计算机视觉算法,纽约,John Wiley & Sons, Inc., 1997,第23-29页。
扩展功能
之前介绍过的R2006a
你也可以从以下列表中选择一个网站:
