多个明确MPC控制器
多个明确MPC控制器
库:
模型预测控制工具箱
描述
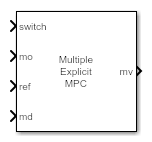
的多个明确MPC控制器块使用下面的输入信号:
测量装置输出(
莫)参考或定位点(
裁判)测量植物干扰(
医学博士),如果任何开关信号(
开关)
的多个明确MPC控制器块之间可以转换多个明确MPC控制器实时的基于当前的操作条件。通常,您设计每个控制器为特定区域的操作空间。使用可用的测量,你发现当前操作区域和选择适当的主动控制器使用开关轮廓尺寸。
选择开关信号活跃的控制器的两个或两个以上的候选人名单,明确MPC控制器。这些控制器在线计算努力减少使用一览表控制律在每个控制区间而不是解决一个二次规划问题。有关更多信息,请参见明确的MPC控制器。
提高效率,不活跃的控制器不评估他们的控制律。然而,提供无扰控制器之间的转移,不活跃的控制器继续执行状态估计。
像的多个MPC控制器块,你不能禁用的评价多个明确MPC控制器块。一个控制器必须始终活跃。
就像明确的MPC控制器块,多个明确MPC控制器块只支持可选金宝app的MPC特性的一个子集,为下面的表中列出。
| 金宝app支持的功能 | 不支金宝app持的功能 |
|---|---|
|
|
港口
输入
输出
参数
扩展功能
版本历史
介绍了R2016b