公园的变换
实施ABC到DQ0.变换
- 图书馆:
模拟/电气/控制/数学变换

描述
这公园的变换块将三相系统的时域组件转换为ABC参考帧直接,正交和旋转参考帧中的零分量。该块可以保留具有系统的功率的主动和无功功率ABC通过实现公园变换的不变版本来参考帧。对于平衡系统,零分量等于零。
您可以配置块以对齐一种- 三相系统的轴向D.- 要么问:旋转参考帧的轴 -T.= 0。图中显示了定子绕组的磁轴方向ABC参考框架和旋转DQ0.参考系地点:
这一种设在和问:-axis初始对齐。

这一种设在和D.-axis初始对齐。
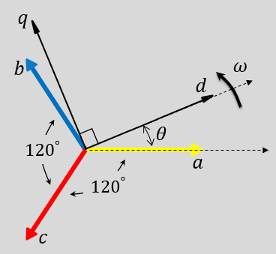
在这两种情况下,角度θ=ωT., 在哪里:
θ是角度之间的角度一种和问:轴为问:- 轴向对齐或之间的角度一种和D.轴为D.-axis对齐。
ω转速是多少D.-问:参考系。
T.是时间,在初始对齐中。
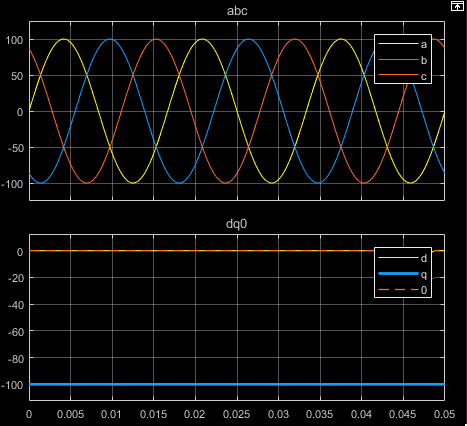
图中显示了等效平衡各组分的时间响应ABC和DQ0.为:
对齐的一种- 相传向量问:设在

对齐的一种- 相传向量D.设在
方程式
这公园的变换块实现变换一种- 相对于问:-axis对齐
在哪里:
一种那B.,C是三相系统的组成部分ABC参考系。
D.和问:是旋转参考框架中的双轴系统的组件。
0.是静止参考系中两轴系统的零分量。
对于电力不变一种- 相对于问:-axis对齐,块使用此等式实现变换:
为一种- 相对于D.-axis对齐,块使用此等式实现变换:
块实现了一个电源不变一种- 相对于D.-axis对齐
港口
输入
输出
参数
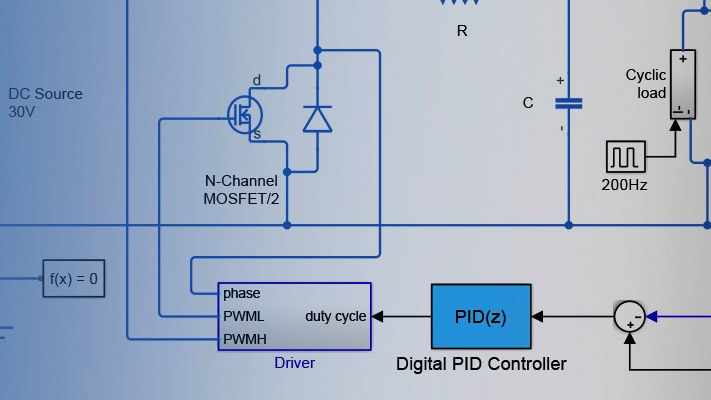
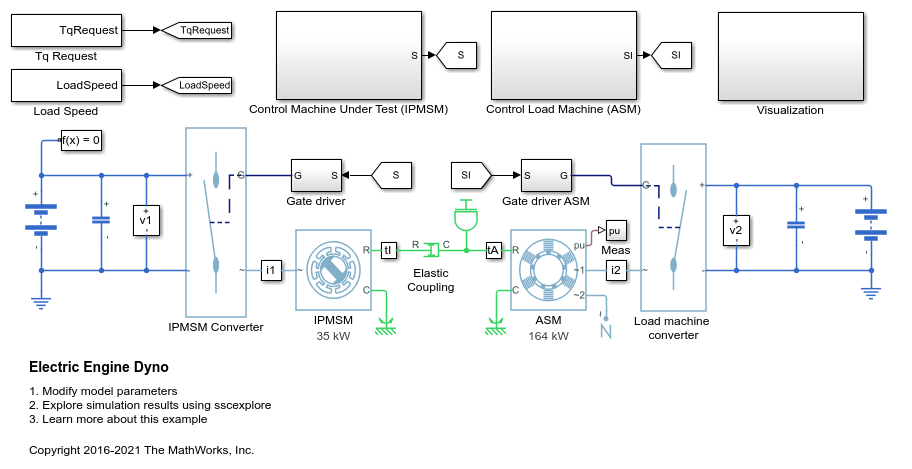
模型例子
















参考文献
[1] Krause, P., O. Wasynczuk, S. D. Sudhoff和S. Pekarek。电机与驱动系统分析。Piscatawy,NJ:Wiley-Ieee Press,2013。
扩展能力
你也可以从以下列表中选择一个网站: